Just a short recipe on how to compile 'tslib' and use it with Qt5 on Xilinx Petalinux.
At the moment I'm using Ubuntu 14.04 64bit as a host machine, MicroZed 7020 as a target, Xilinx Vivado version 2014.2 and Petalinux vesion 2014.2.
My Vivado tools installed to default path '/opt/Xilinx' and I will install Qt5.3.2 and tslib to /opt/Qt/ and /opt/tslib directories.
Also, I'm using 'Project' folder in my home directory for Vivado and Petalinux projects. Now, after I set the scene, let's actually build it.
- Clone tslib into our Project folder:
- To configure and build 'tslib' we have to setup a few enviroment variables: CROSS_COMPILE, CC, CXX and we have to source Vivado settings64.sh. So, I will create and use a small bash script:
- Next 'evtest'. This is a small, but very helpful utility when you trying to figure out what is wrong with your touchscreen or touchscreen controller.
- Tslib generates 'ts.conf' file, which you can locate in /opt/tslib/etc/. We have to uncomment the module_raw for our touch controller. In my case it 'input'.
- Now when we got tslib, we can configure Qt5. I will build Qt5 from scratch using opensource Qt Everywhere Sources. So, lets download and unpack Qt5 sources.
- Now, before we can configure Qt5 we must create 'mkspecs' for our Xilinx Zynq. So, create new device folder 'linux-arm-xilinx-zynq-g++' and two files in it. 'qplatformdefs' contains just an include, but second file 'qmake.conf' is quite important. This is the place where we set your CFLAGS/CXXFLAGS, some ENV variables which will be used by default by QMAKE and later by Qt5 libs.
So, if you need to set something differently, this is the time!
- Next step is to configure Qt5 and below configuration I'm using. Again, this is critical step and if you have change something (compile with OpenGl support for example), you have to do it now. Also, if you want to reconfigure Qt, you have to clean using 'gmake clean' before running configuration script again.
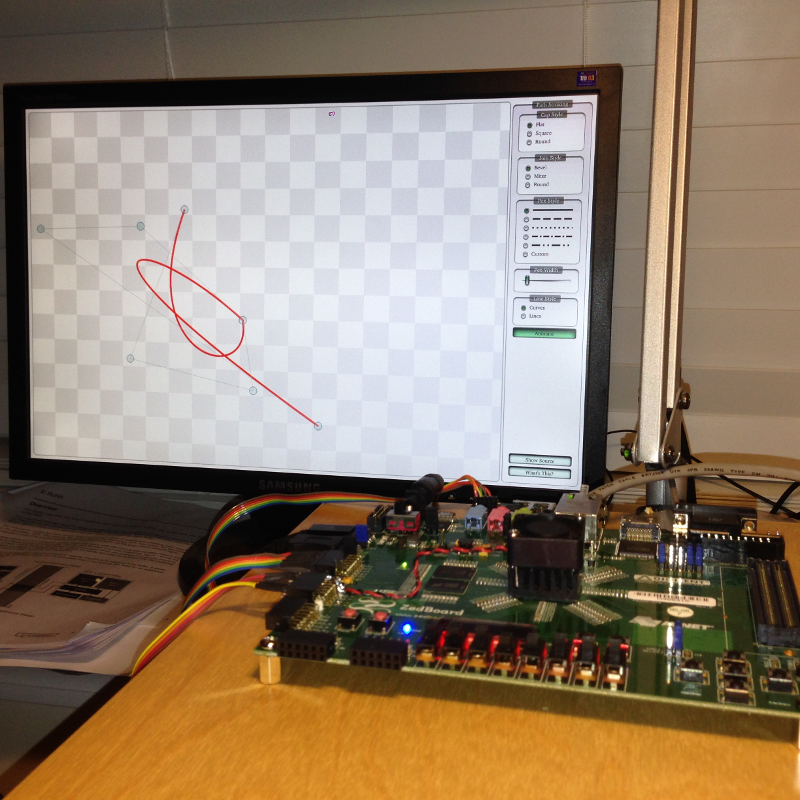
- After a few minutes(ha-ha) build will finish and we can build a couple of Qt examples for testing purposes. I created a small script to build each example individually. All I need to do is just copy it in project folder and run it. Examples I usually use is a 'Mainwindow' and a 'Pathstroke'.
- Now, to install Qt5 libs and apps we will create Petalinux 'component'.
- Now, we have to make a few changes in our new 'component' in a Petalinux project( ~/Projects/$PetalinuxProjectName/components/libs/qt-5.3.2/): create 'Makefile' and some file with settings for Qt applications. Tet's call it 'profile.qt-5.3.2'.
- We also need to add 'tslib' to our buildroot. So, I will create another Petalinux 'component', create and copy tslib configuration files:
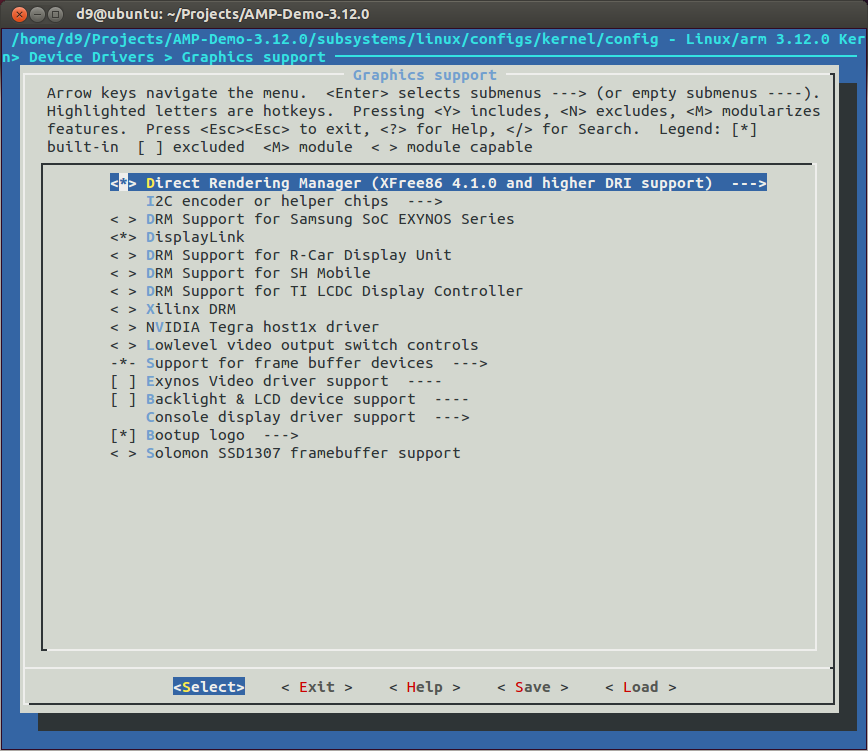
- Qt is a C++ library and like any other C++ application or library it depend on standard c++ library. So, if you didn't include it in your rootfs yet you have to do it now.
petalinux-config -c rootfs
Then go to 'Filesystem Packages' -> 'Base' -> 'External-xilinx-toolchain' -> Enable 'libstdc++6'.
- This is basically it. Now we have rebuild our Petalinux project and start using it. Just a few notes:
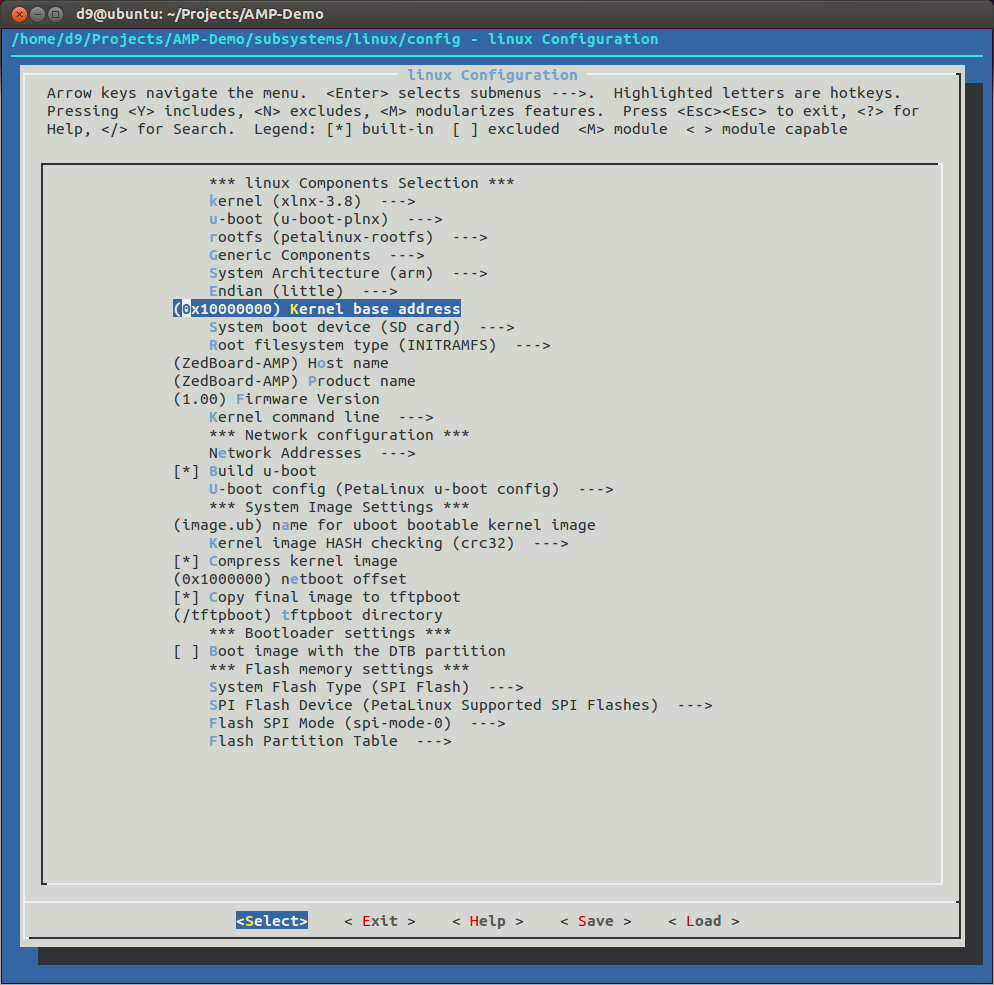
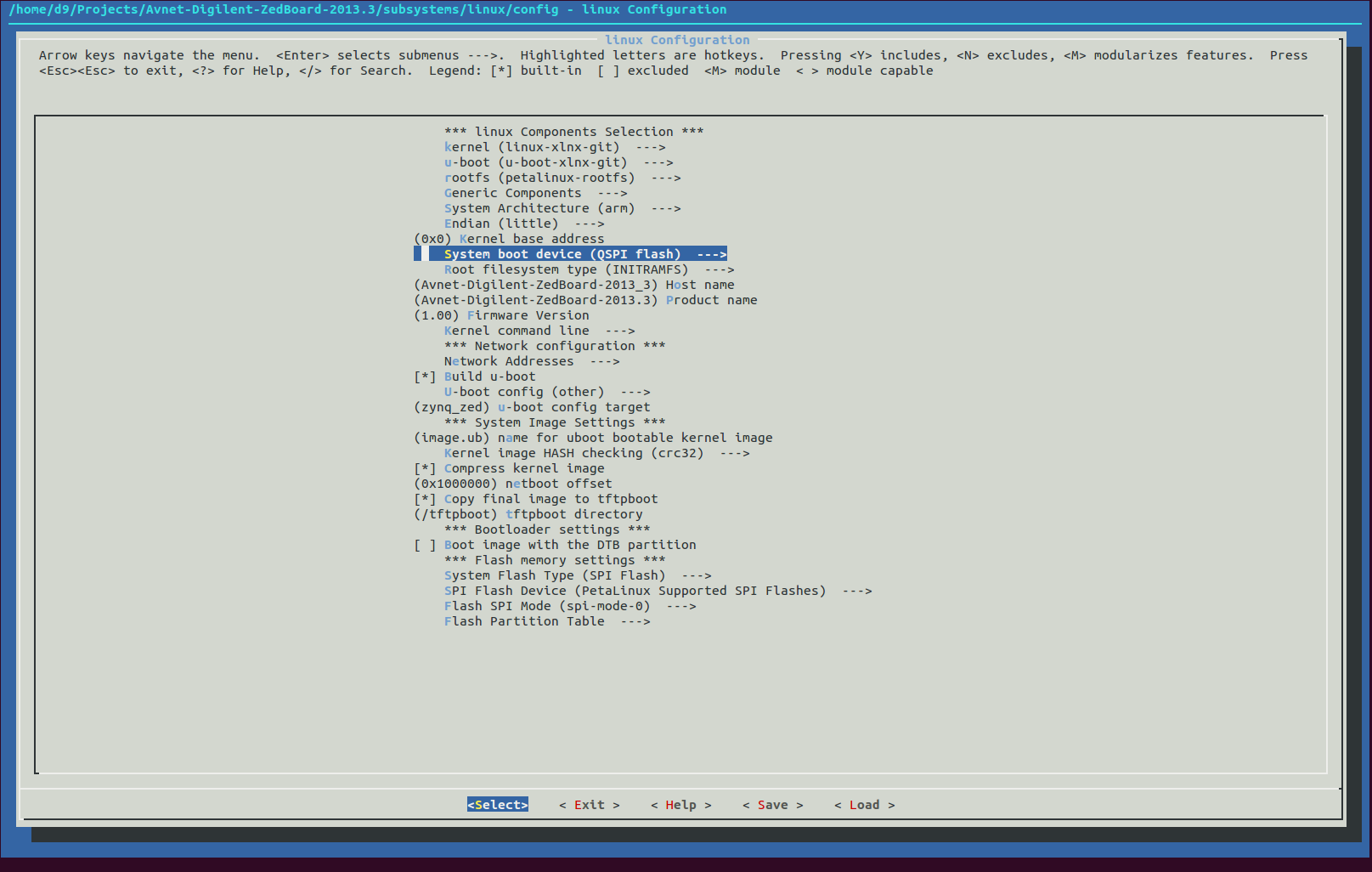
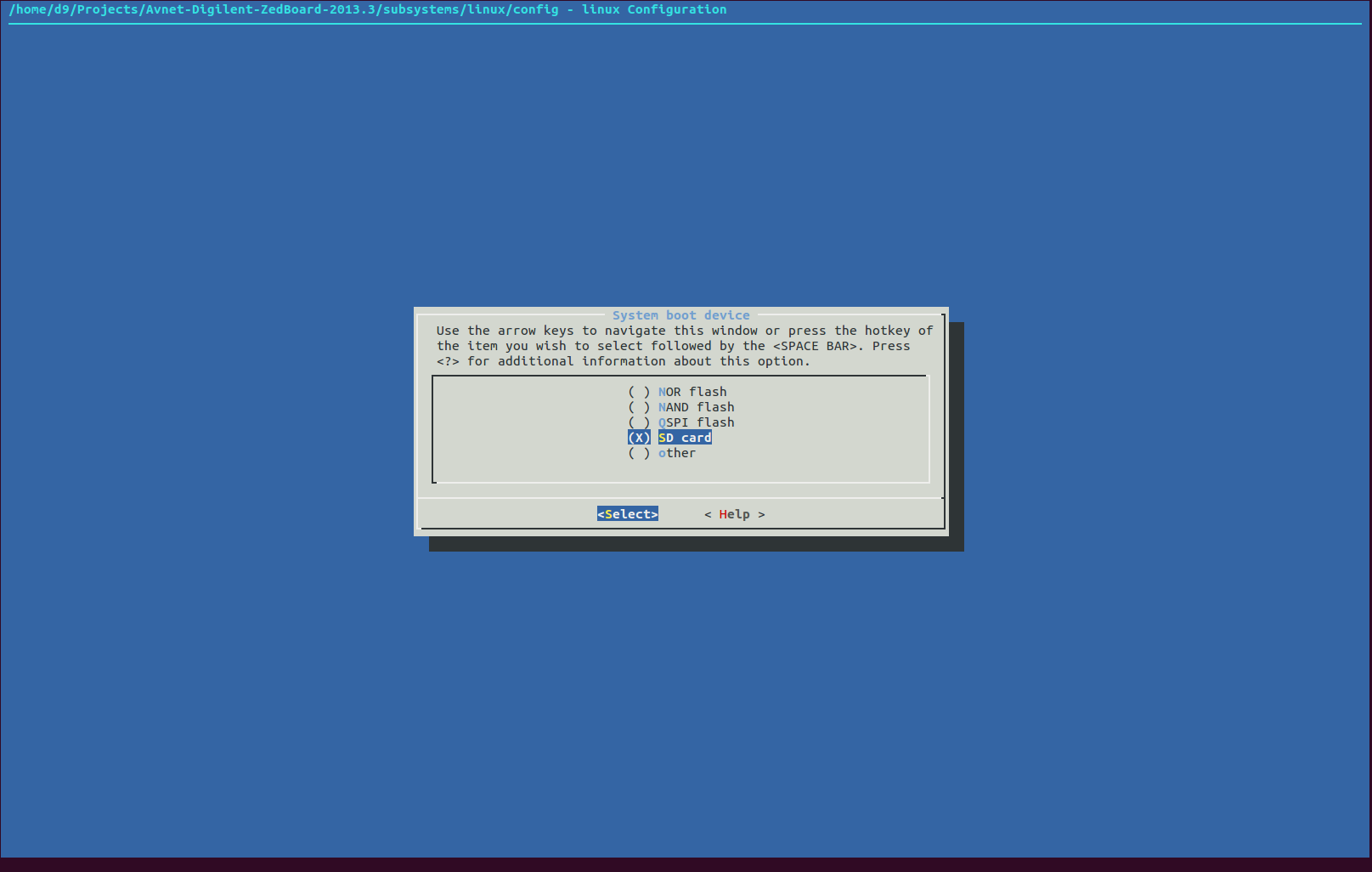
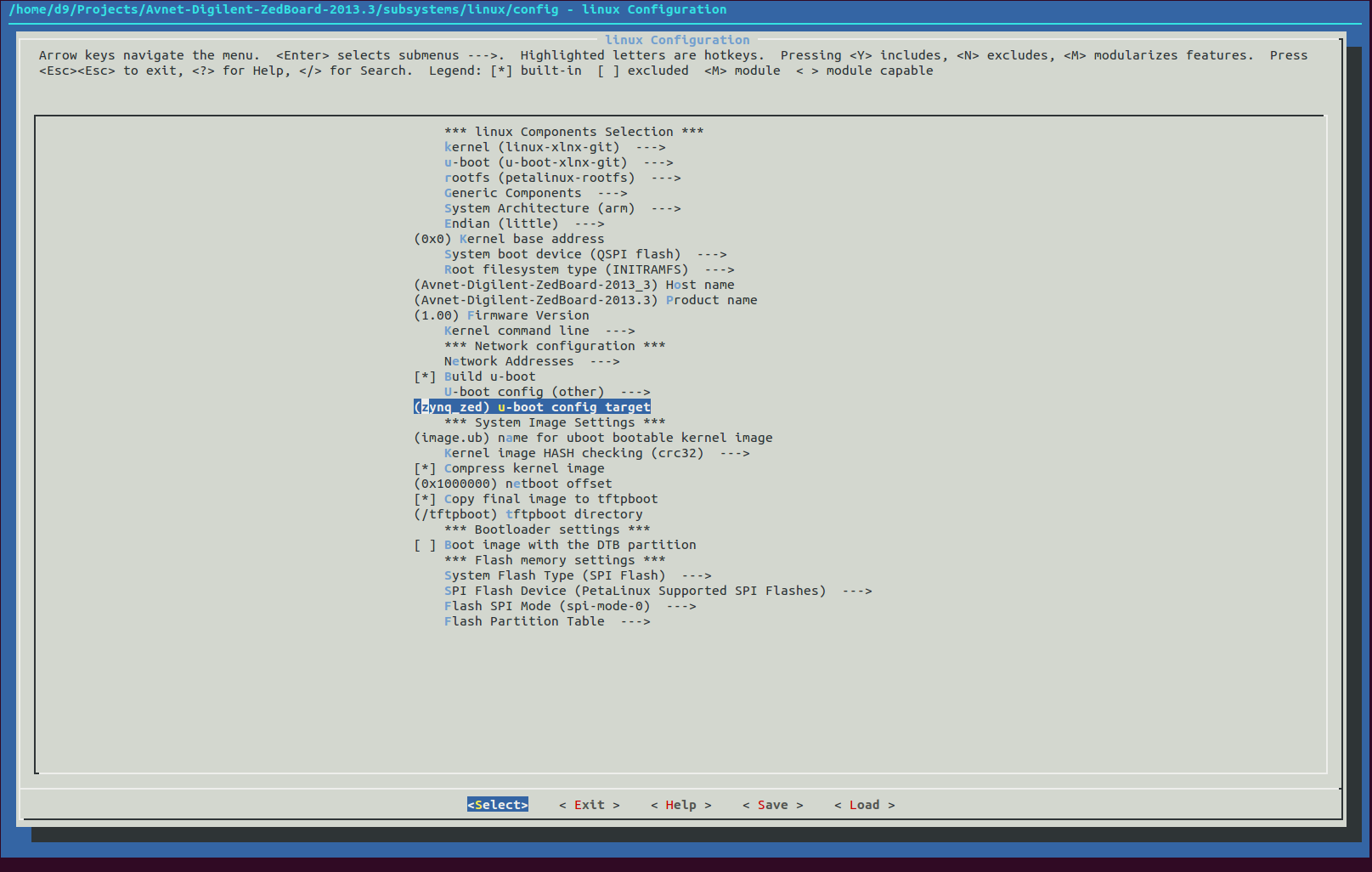
- After we add Qt5 libraries, our Linux image file will grow is size, so you may need to change U-boot settings to accomodate it.
- If you need to recalibrate touchscreen - use 'ts_calibrate' utility.
- If you want to keep it - you must save changes in '/etc/pointercal' file.
- If you got not only touchscreen, but also mouse and/or keyboard you have to start your application with additional parameters: '-plugin EvdevMouse' '-plugin EvdevKeyboard'.
cd ~/Projects/
git clone https://github.com/kergoth/tslib.git tslib
cd ~/Projects/tslib
#!/bin/bash
export CROSS_COMPILE=arm-xilinx-linux-gnueabi-
source /opt/Xilinx/Vivado/2014.2/settings64.shexport CC=$(which arm-xilinx-linux-gnueabi-gcc)
export CXX=$(which arm-xilinx-linux-gnueabi-g++)./autogen.sh
./configure --host=arm-xilinx-linux-gnueabi --prefix /opt/tslibmake
sudo make install
cd ~/Projects/
git clone git://anongit.freedesktop.org/evtest evtest_util
cd ~/Projects/evtest_util
#!/bin/bash
export CROSS_COMPILE=arm-xilinx-linux-gnueabi-
source /opt/Xilinx/Vivado/2014.2/settings64.sh./autogen.sh
./configure --host=arm-xilinx-linux-gnueabi prefix=/opt/evtest/
make
sudo make install
cd ~/Projects/
wget http://download.qt-project.org/official_releases/qt/5.3/5.3.2/single/qt-everywhere-opensource-src-5.3.2.tar.gz
tar -zxvf qt-everywhere-opensource-src-5.3.2.tar.gz
cd ~/Projects/qt-everywhere-opensource-src-5.3.2/qtbase/mkspecs/devices/
create linux-arm-xilinx-zynq-g++
'qmake.conf':
#
# qmake configuration for linux-g++ using arm-xilinx-g++ compiler
#
MAKEFILE_GENERATOR = UNIX
CONFIG += incremental gdb_dwarf_index
QMAKE_INCREMENTAL_STYLE = sublib
include(../../common/linux.conf)
include(../../common/gcc-base-unix.conf)
include(../../common/g++-unix.conf)
load(device_config)
QT_QPA_DEFAULT_PLATFORM = linuxfb
# modifications to g++.conf
QMAKE_CC = $${CROSS_COMPILE}gcc
QMAKE_CXX = $${CROSS_COMPILE}g++
QMAKE_LINK = $${QMAKE_CXX}
QMAKE_LINK_SHLIB = $${QMAKE_CXX}
# modifications to linux.conf
QMAKE_AR = $${CROSS_COMPILE}ar cqs
QMAKE_OBJCOPY = $${CROSS_COMPILE}objcopy
QMAKE_NM = $${CROSS_COMPILE}nm -P
QMAKE_STRIP = $${CROSS_COMPILE}strip
QMAKE_CFLAGS += -I$$[QT_SYSROOT]/include -DZYNQ
QMAKE_CXXFLAGS += -Wno-psabi -I$$[QT_SYSROOT]/include -DZYNQ
QMAKE_LFLAGS += -L$$[QT_SYSROOT]/lib
QMAKE_CFLAGS += -march=armv7-a -mtune=cortex-a9 -mcpu=cortex-a9 -mfpu=neon -pipe -fomit-frame-pointer
QMAKE_CXXFLAGS += $$QMAKE_CFLAGS
deviceSanityCheckCompiler()
load(qt_config)
'qplatformdefs.h':
/**************************************************************************** ** ** Copyright (C) 2013 Digia Plc and/or its subsidiary(-ies). ** Contact: http://www.qt-project.org/legal ** ** This file is part of the qmake spec of the Qt Toolkit. ** ** $QT_BEGIN_LICENSE:LGPL$ ** Commercial License Usage ** Licensees holding valid commercial Qt licenses may use this file in ** accordance with the commercial license agreement provided with the ** Software or, alternatively, in accordance with the terms contained in ** a written agreement between you and Digia. For licensing terms and ** conditions see http://qt.digia.com/licensing. For further information ** use the contact form at http://qt.digia.com/contact-us. ** ** GNU Lesser General Public License Usage ** Alternatively, this file may be used under the terms of the GNU Lesser ** General Public License version 2.1 as published by the Free Software ** Foundation and appearing in the file LICENSE.LGPL included in the ** packaging of this file. Please review the following information to ** ensure the GNU Lesser General Public License version 2.1 requirements ** will be met: http://www.gnu.org/licenses/old-licenses/lgpl-2.1.html. ** ** In addition, as a special exception, Digia gives you certain additional ** rights. These rights are described in the Digia Qt LGPL Exception ** version 1.1, included in the file LGPL_EXCEPTION.txt in this package. ** ** GNU General Public License Usage ** Alternatively, this file may be used under the terms of the GNU ** General Public License version 3.0 as published by the Free Software ** Foundation and appearing in the file LICENSE.GPL included in the ** packaging of this file. Please review the following information to ** ensure the GNU General Public License version 3.0 requirements will be ** met: http://www.gnu.org/copyleft/gpl.html. ** ** ** $QT_END_LICENSE$ ** ****************************************************************************/ #include "../../linux-g++/qplatformdefs.h"
cd ~/Projects/qt-everywhere-opensource-src-5.3.2/
./build_qt5_3_2.sh
gmake
sudo gmake install
'build_qt5_3_2.sh':
#!/bin/bash
export CROSS_COMPILE=arm-xilinx-linux-gnueabi-
source /opt/Xilinx/Vivado/2014.2/settings64.sh
read -p "Run 'confclean'? (y/n) "
if [ "$REPLY" == "y" ]; then
gmake clean
fi
./configure -prefix /opt/Qt/5.3.2 \
-device linux-arm-xilinx-zynq-g++ \
-device-option CROSS_COMPILE=arm-xilinx-linux-gnueabi- \
-release \
-confirm-license \
-opensource \
-optimized-qmake \
-no-qml-debug \
-qt-zlib \
-qt-libpng \
-qt-libjpeg \
-qt-freetype \
-qt-harfbuzz \
-qt-pcre \
-no-xcb \
-qt-xkbcommon \
-no-opengl \
-no-pch \
-verbose \
-no-kms \
-no-eglfs \
-no-icu \
-no-iconv \
-skip qtwebkit \
-tslib \
-no-gcc-sysroot \
-nomake tools \
-no-compile-examples \
-I /opt/tslib/include \
-L /opt/tslib/lib
read -p "Run 'gmake'? (y/n) "
if [ "$REPLY" == "y" ]; then
cd ~/Projects/$QtSrcName
gmake
fi
read -p "Run 'gmake install'? (y/n) "
if [ "$REPLY" == "y" ]; then
cd ~/Projects/$QtSrcName
sudo gmake install
fi
'build_qt5_app.sh'
#!/bin/bash export CROSS_COMPILE=arm-xilinx-linux-gnueabi- source /opt/Xilinx/Vivado/2014.3/settings64.sh export QTDIR=/opt/Qt/5.3.2 export PATH=$QTDIR/bin:$PATH export LD_LIBRARY_PATH=/$QTDIR/lib:$LD_LIBRARY_PATH qmake make sudo make install
cd ~/Projects/$PetalinuxProjectName
petalinux-create -t libs -n qt-5.3.2 --enable
cd components/libs/qt-5.3.2/
rm libqt*
cp -Pr /opt/Qt/5.3.2/lib .
cp -Pr /opt/Qt/5.3.2/plugins/ ./lib/
mkdir bin
cp /opt/Qt/5.3.2/examples/widgets/painting/pathstroke/pathstroke bin/pathstroke
cp /opt/Qt/5.3.2/examples/widgets/mainwindows/mainwindow/mainwindow bin/mainwindow
'profile.qt-5.3.2':
export QT_PLUGIN_PATH=/usr/lib/plugins export QT_QPA_FONTDIR=/usr/lib/fonts export QT_QPA_PLATFORM_PLUGIN_PATH=/usr/lib/plugins/platforms export QT_QPA_PLATFORM=linuxfb export QT_QPA_GENERIC_PLUGINS=tslib:/dev/input/event0
Makefile(Don't forget to change username):
ifndef PETALINUX $(error "Error: PETALINUX environment variable not set. Change to the root of your PetaLinux install, and source the settings.sh file") endif include libs.common.mk LIB=libqt_5_3_2 all: build install .PHONY: build build: install: #Install libraries and fonts to the rootfs. mkdir -p $(TARGETDIR)/usr/lib USER=d9 GROUP=d9 rsync -rav ./bin/* $(TARGETDIR)/usr/bin/ rsync -rav ./lib/* $(TARGETDIR)/usr/lib/ #Install the script to ensure the font directory is properly specified. mkdir -p $(TARGETDIR)/etc/profile.d cp profile.qt-5.3.2 $(TARGETDIR)/etc/profile.d/profile.qt-5.3.2 clean:
cd ~/Projects/$PetalinuxProjectName
petalinux-create -t libs -n tslib --enable
cd components/libs/tslib/
rm libtslib*
rm README
cp -Pr /opt/tslib/bin .
cp -Pr /opt/tslib/lib .
cp -Pr /opt/etc/ts.conf .
cp -Pr Makefile .
cp -Pr profile.tslib .
cp -Pr pointercal .
My 'profile.tslib'. You may need to change it:
export TSLIB_TSEVENTTYPE='INPUT' export TSLIB_CALIBFILE='/etc/pointercal' export TSLIB_CONFFILE='/etc/ts.conf' export TSLIB_CONSOLEDEVICE='none' export TSLIB_FBDEVICE='/dev/fb0' export TSLIB_PLUGINDIR='/usr/lib/ts' export TSLIB_TSDEVICE='/dev/input/event0'
'pointercal' for my 800x600 touchscreen:
94 -13605 53617952 -10567 205 40161292 65536 800 600
'Makefile' (Don't forget to change username):
ifndef PETALINUX $(error "Error: PETALINUX environment variable not set. Change to the root of your PetaLinux install, and source the settings.sh file") endif include libs.common.mk LIB=tslib all: build install .PHONY: build build: install: #Install libraries and fonts to the rootfs. mkdir -p $(TARGETDIR)/usr/lib USER=d9 GROUP=d9 rsync -rav ./bin/* $(TARGETDIR)/usr/bin/ rsync -rav ./lib/* $(TARGETDIR)/usr/lib/ cp ts.conf $(TARGETDIR)/etc/ts.conf cp profile.tslib $(TARGETDIR)/etc/profile.d/tslib cp pointercal $(TARGETDIR)/etc/pointercal clean: