Today Xilinx released an update to its Vivado. New version number is 2015.2 and biggest news to me is that it now supports Ubuntu Linux 14.04 TLS(64-bit). It also have number of bugs fixed, but not much of new features - just a support for a few new devices and added CDC report.
Also, just like with 2015.1 where is no Petalinux update. At least yet.
Just a short recipe on how to compile 'tslib' and use it with Qt5 on Xilinx Petalinux.
At the moment I'm using Ubuntu 14.04 64bit as a host machine, MicroZed 7020 as a target, Xilinx Vivado version 2014.2 and Petalinux vesion 2014.2.
My Vivado tools installed to default path '/opt/Xilinx' and I will install Qt5.3.2 and tslib to /opt/Qt/ and /opt/tslib directories.
Also, I'm using 'Project' folder in my home directory for Vivado and Petalinux projects. Now, after I set the scene, let's actually build it.
Clone tslib into our Project folder:
cd ~/Projects/
git clone https://github.com/kergoth/tslib.git tslib
cd ~/Projects/tslib
To configure and build 'tslib' we have to setup a few enviroment variables: CROSS_COMPILE, CC, CXX and we have to source Vivado settings64.sh. So, I will create and use a small bash script:
./autogen.sh
./configure --host=arm-xilinx-linux-gnueabi prefix=/opt/evtest/
make
sudo make install
Tslib generates 'ts.conf' file, which you can locate in /opt/tslib/etc/. We have to uncomment the module_raw for our touch controller. In my case it 'input'.
Now when we got tslib, we can configure Qt5. I will build Qt5 from scratch using opensource Qt Everywhere Sources. So, lets download and unpack Qt5 sources.
cd ~/Projects/
wget http://download.qt-project.org/official_releases/qt/5.3/5.3.2/single/qt-everywhere-opensource-src-5.3.2.tar.gz
tar -zxvf qt-everywhere-opensource-src-5.3.2.tar.gz
Now, before we can configure Qt5 we must create 'mkspecs' for our Xilinx Zynq. So, create new device folder 'linux-arm-xilinx-zynq-g++' and two files in it. 'qplatformdefs' contains just an include, but second file 'qmake.conf' is quite important. This is the place where we set your CFLAGS/CXXFLAGS, some ENV variables which will be used by default by QMAKE and later by Qt5 libs.
So, if you need to set something differently, this is the time!
cd ~/Projects/qt-everywhere-opensource-src-5.3.2/qtbase/mkspecs/devices/
create linux-arm-xilinx-zynq-g++
/****************************************************************************
**
** Copyright (C) 2013 Digia Plc and/or its subsidiary(-ies).
** Contact: http://www.qt-project.org/legal
**
** This file is part of the qmake spec of the Qt Toolkit.
**
** $QT_BEGIN_LICENSE:LGPL$
** Commercial License Usage
** Licensees holding valid commercial Qt licenses may use this file in
** accordance with the commercial license agreement provided with the
** Software or, alternatively, in accordance with the terms contained in
** a written agreement between you and Digia. For licensing terms and
** conditions see http://qt.digia.com/licensing. For further information
** use the contact form at http://qt.digia.com/contact-us.
**
** GNU Lesser General Public License Usage
** Alternatively, this file may be used under the terms of the GNU Lesser
** General Public License version 2.1 as published by the Free Software
** Foundation and appearing in the file LICENSE.LGPL included in the
** packaging of this file. Please review the following information to
** ensure the GNU Lesser General Public License version 2.1 requirements
** will be met: http://www.gnu.org/licenses/old-licenses/lgpl-2.1.html.
**
** In addition, as a special exception, Digia gives you certain additional
** rights. These rights are described in the Digia Qt LGPL Exception
** version 1.1, included in the file LGPL_EXCEPTION.txt in this package.
**
** GNU General Public License Usage
** Alternatively, this file may be used under the terms of the GNU
** General Public License version 3.0 as published by the Free Software
** Foundation and appearing in the file LICENSE.GPL included in the
** packaging of this file. Please review the following information to
** ensure the GNU General Public License version 3.0 requirements will be
** met: http://www.gnu.org/copyleft/gpl.html.
**
**
** $QT_END_LICENSE$
**
****************************************************************************/
#include "../../linux-g++/qplatformdefs.h"
Next step is to configure Qt5 and below configuration I'm using. Again, this is critical step and if you have change something (compile with OpenGl support for example), you have to do it now. Also, if you want to reconfigure Qt, you have to clean using 'gmake clean' before running configuration script again.
cd ~/Projects/qt-everywhere-opensource-src-5.3.2/
./build_qt5_3_2.sh
gmake
sudo gmake install
After a few minutes(ha-ha) build will finish and we can build a couple of Qt examples for testing purposes. I created a small script to build each example individually. All I need to do is just copy it in project folder and run it. Examples I usually use is a 'Mainwindow' and a 'Pathstroke'.
'build_qt5_app.sh'
#!/bin/bash
export CROSS_COMPILE=arm-xilinx-linux-gnueabi-
source /opt/Xilinx/Vivado/2014.3/settings64.sh
export QTDIR=/opt/Qt/5.3.2
export PATH=$QTDIR/bin:$PATH
export LD_LIBRARY_PATH=/$QTDIR/lib:$LD_LIBRARY_PATH
qmake
make
sudo make install
Now, to install Qt5 libs and apps we will create Petalinux 'component'.
cd ~/Projects/$PetalinuxProjectName
petalinux-create -t libs -n qt-5.3.2 --enable
cd components/libs/qt-5.3.2/
rm libqt*
cp -Pr /opt/Qt/5.3.2/lib .
cp -Pr /opt/Qt/5.3.2/plugins/ ./lib/
mkdir bin
cp /opt/Qt/5.3.2/examples/widgets/painting/pathstroke/pathstroke bin/pathstroke
cp /opt/Qt/5.3.2/examples/widgets/mainwindows/mainwindow/mainwindow bin/mainwindow
Now, we have to make a few changes in our new 'component' in a Petalinux project( ~/Projects/$PetalinuxProjectName/components/libs/qt-5.3.2/): create 'Makefile' and some file with settings for Qt applications. Tet's call it 'profile.qt-5.3.2'.
ifndef PETALINUX
$(error "Error: PETALINUX environment variable not set. Change to the root of your PetaLinux install, and source the settings.sh file")
endif
include libs.common.mk
LIB=libqt_5_3_2
all: build install
.PHONY: build
build:
install:
#Install libraries and fonts to the rootfs.
mkdir -p $(TARGETDIR)/usr/lib
USER=d9
GROUP=d9
rsync -rav ./bin/* $(TARGETDIR)/usr/bin/
rsync -rav ./lib/* $(TARGETDIR)/usr/lib/
#Install the script to ensure the font directory is properly specified.
mkdir -p $(TARGETDIR)/etc/profile.d
cp profile.qt-5.3.2 $(TARGETDIR)/etc/profile.d/profile.qt-5.3.2
clean:
We also need to add 'tslib' to our buildroot. So, I will create another Petalinux 'component', create and copy tslib configuration files:
ifndef PETALINUX
$(error "Error: PETALINUX environment variable not set. Change to the root of your PetaLinux install, and source the settings.sh file")
endif
include libs.common.mk
LIB=tslib
all: build install
.PHONY: build
build:
install:
#Install libraries and fonts to the rootfs.
mkdir -p $(TARGETDIR)/usr/lib
USER=d9
GROUP=d9
rsync -rav ./bin/* $(TARGETDIR)/usr/bin/
rsync -rav ./lib/* $(TARGETDIR)/usr/lib/
cp ts.conf $(TARGETDIR)/etc/ts.conf
cp profile.tslib $(TARGETDIR)/etc/profile.d/tslib
cp pointercal $(TARGETDIR)/etc/pointercal
clean:
Qt is a C++ library and like any other C++ application or library it depend on standard c++ library. So, if you didn't include it in your rootfs yet you have to do it now.
petalinux-config -c rootfs
Then go to 'Filesystem Packages' -> 'Base' -> 'External-xilinx-toolchain' -> Enable 'libstdc++6'.
This is basically it. Now we have rebuild our Petalinux project and start using it. Just a few notes:
- After we add Qt5 libraries, our Linux image file will grow is size, so you may need to change U-boot settings to accomodate it.
- If you need to recalibrate touchscreen - use 'ts_calibrate' utility.
- If you want to keep it - you must save changes in '/etc/pointercal' file.
- If you got not only touchscreen, but also mouse and/or keyboard you have to start your application with additional parameters: '-plugin EvdevMouse' '-plugin EvdevKeyboard'.
I finally figure it out why Analog Devices reference design create/generated in Vivado 2014 by script(obviously updated to use new IP's, otherwise it didn't assemble 'Block Design' at all) didn't work. Reason is changes in Xilinx Concat IP, which used in reference design to concatenate interrupt signals from VDMA and I2C IP blocks to Zynq's F2S interrupt bus.
So, now in 2014.1, we got version 2.0 of it and it preserve the order of input signals on the output. Which means we must either change inputs order or change interrupt numbers in DTS.
So, for AD reference design generated in Vivado2014.1 interrupts are:
As of today, 25 May 2014, to create HDL design for ADV7511 from scratch, we have to use Vivado 2013.4, even though Vivado 2014.1 is already available. The reason is some changes in a Xilinx IP's (which I didn't had a chance to figure out yet) prevent HDL design from build/work properly.
First step is to download HDL libraries and projects from AnalogDevices repositories on a github: https://github.com/analogdevicesinc/hdl. You can clone it or download a ZIP. I will download a ZIP and extract 'hdl-master' in my Projects/FPGA/ folder on Windows7 machine.
Second step is to build a few Analog Devices IP required to create ZedBoard HDMI design. Run Xilinx Vivado 2013.4, open a TCL console, change directories and 'source' a .tcl scripts. For example, to build AXI_CLKGEN IP:
cd c:/Projects/FPGA/hdl-master/library/axi_clkgen
source ./axi_clkgen_ip.tcl
After script finish, close created project and build the next. For ZedBoard we have build the next IP's:
hdl-master/library/axi_clkgen
hdl-master/library/axi_hdmi_tx
hdl-master/library/axi_i2s_adi
hdl-master/library/axi_spdif_tx
hdl-master/library/util_i2c_mixer
After we done with all required IP's, we can build ADV7511 reference design for ZedBoard. In a Tcl Console change directory to ADV7511 and run 'system_project' script.
cd c:/Projects/FPGA/hdl-master/projects/adv7511/zed/
source ./system_project.tcl
Script will create block design, run synthesis and implementation, generate bitstream and even export software to SDK(without opening it). This was the case on my system - everything went smoothly. We are done with Vivado and can close it.
We have to create HDL in Vivado 2013.4, but later we can import created project into Vivado 2014.1 and update it to use latest Xilinx IP's.
Let's build a FSBL. We need very typical Zynq first stage boot loader and I covered creation of it before, so now just a short description:
Run XSDK.
Create new 'Hardware Platform Specification' project (I named it 'ZedBoard-HDMI-HW') and specify HW created in a previous step.
Create Application project (named 'ZedBoard-HDMI-FSBL') using our new 'Hardware Platform' and select to create new BSP for it. Don't forget to use 'Zynq FSBL' template. Build it if this not done automatically.
Next step is to create PetaLinux BSP. This is also very typical PetaLinux BSP, just don't forget to change 'Configuration' to reflect ZedBoard configuration and name it 'ZedBoard-HDMI-petalinux_bsp'.
We are done with Xilinx SDK. You can close it.
Next step is to create PetaLinux project and set 'hardware description'. I will call it 'ZedBoard-HDMI' Petalinux project:
petalinux-create -t project -n ZedBoard-HDMI
cd ~/Projects/ZedBoard-HDMI-petalinux_bsp/
petalinux-config --get-hw-description -p ../ZedBoard-HDMI/
cd ~/Projects/ZedBoard-HDMI/
rm -r hw-description
Now, as of today, ADV7511 Linux driver not in a mainstream kernel. So, we need to get Kernel from Analog Devices repository with appropriate patches. Current version is 3.14.0. Let's clone it, and checkout 'xcomm_zynq' branch.
cd ~/Projects/
git clone https://github.com/analogdevicesinc/linux.git analogdevices-kernel
cd analogdevices-kernel/
git checkout xcomm_zynq
Create necessary directories and copy 'xcomm_zynq' branch to our PetaLinux project directory.
cd ~/Projects/
mkdir ~/Projects/ZedBoard-HDMI/components
mkdir ~/Projects/ZedBoard-HDMI/components/linux-kernel
cp -a analogdevices-kernel ~/Projects/ZedBoard-HDMI/components/linux-kernel/
Run 'petalinux-config' and change kernel to 'analogdevices-kernel' and system boot device to 'SD card'.
cd ZedBoard-HDMI
petalinux-config
Next we need to configure Linux kernel for PetaLinux and we need to enable all options required by ADV7511. AnalogDevices kernel support special configuration option 'zynq_xcomm_adv7511_defconfig', but we cannot run it with PetaLinux. So, we have to pre-configure kernel separately ('make ARCH=arm zynq_xcomm_adv7511_defconfig') and just copy resulted config into 'ZedBoard-HDMI/subsystems/linux/configs/kernel'. So, I did it and also copied it into PetaLinux Kernel configs directory '/opt/petalinux-v2013.10-final/etc/template/project/template-zynq/subsystems/linux/configs/kernel'. So, I can later reuse it. Also notice that kernel default config file have dot in the front and PetaLinux files don't.
Anyway, here is link to my resulted kernel config file: https://blog.idv-tech.com/wp-content/uploads/2014/05/config_hdmi_3_14.config
We also, have to modify 'devices tree' generated by PetaLinux for our project. AnalogDecices Linux kernel have template for ZedBoard which you can find in 'arch/arm/boot/dts/zynq-zed-adv7511.dts', so we basically have to copy missing devices from AD into our tree.
Link to my resulted DTS file for ZedBoard: https://blog.idv-tech.com/wp-content/uploads/2014/05/adv7511_dts.config.
We are basically done. At this point you my want to modify PetaLinux project, for example, include Qt5 library and test app to check frame buffer device later. I covered this topics in my previous post, so I wont repeat it here.
Build Petalinux project, create BOOT.BIN and copy it together with Linux image file 'image.ub' on SD card:
Insert SD card into slot of ZedBoard and turn it on. During boot kernel should detect ADV7511(hdmi) and ADAU1761(sound) devices and create '/dev/fb0' device.So, below partial bootlog from my ZedBoard:
This is basically it - once you have a framebuffer device you can start using it. So I ran my Qt5 test app and it worked. We obviously don't have any hardware acceleration with this HDL design, but we got basic FB device and HDMI output. Congratulations!
This is a small how-to build latest Qt 5.2.1 for Zynq and use it with PetaLinux 2013.10 projects. I'm using 64 bit Ubuntu 13.10 as a host, with Xilinx Vivado 2013.4 and ZedBoard
'Rev. D' as a target. If this howto works for you, especially if you using it on other boards please let me know, so I can push to Qt Zynq support changes.
Download and extract Qt everywhere sources to your home/Download directory:
wget http://download.qt-project.org/official_releases/qt/5.2/5.2.1/single/qt-everywhere-opensource-src-5.2.1.tar.gz
tar -zxvf qt-everywhere-opensource-src-5.2.1.tar.gz
Qt5 don't yet support Zynq device, so we need to add it. You can download and extract prepared files(linux-arm-xilinx-zynq-g++.tar.gz) to 'qt-everywhere-opensource-src-5.2.1/qtbase/mkspecs/devices/linux-arm-xilinx-zynq-g++' folder. Or you create files yourself:
In a 'qt-everywhere-opensource-src-5.2.1/qtbase/mkspecs/devices' create new folder named 'linux-arm-xilinx-zynq-g++'.
In a 'linux-arm-xilinx-zynq-g++' create 'qmake.conf' file:
/****************************************************************************
**
** Copyright (C) 2013 Digia Plc and/or its subsidiary(-ies).
** Contact: http://www.qt-project.org/legal
**
** This file is part of the qmake spec of the Qt Toolkit.
**
** $QT_BEGIN_LICENSE:LGPL$
** Commercial License Usage
** Licensees holding valid commercial Qt licenses may use this file in
** accordance with the commercial license agreement provided with the
** Software or, alternatively, in accordance with the terms contained in
** a written agreement between you and Digia. For licensing terms and
** conditions see http://qt.digia.com/licensing. For further information
** use the contact form at http://qt.digia.com/contact-us.
**
** GNU Lesser General Public License Usage
** Alternatively, this file may be used under the terms of the GNU Lesser
** General Public License version 2.1 as published by the Free Software
** Foundation and appearing in the file LICENSE.LGPL included in the
** packaging of this file. Please review the following information to
** ensure the GNU Lesser General Public License version 2.1 requirements
** will be met: http://www.gnu.org/licenses/old-licenses/lgpl-2.1.html.
**
** In addition, as a special exception, Digia gives you certain additional
** rights. These rights are described in the Digia Qt LGPL Exception
** version 1.1, included in the file LGPL_EXCEPTION.txt in this package.
**
** GNU General Public License Usage
** Alternatively, this file may be used under the terms of the GNU
** General Public License version 3.0 as published by the Free Software
** Foundation and appearing in the file LICENSE.GPL included in the
** packaging of this file. Please review the following information to
** ensure the GNU General Public License version 3.0 requirements will be
** met: http://www.gnu.org/copyleft/gpl.html.
**
**
** $QT_END_LICENSE$
**
****************************************************************************/
#include "../../linux-g++/qplatformdefs.h"
QT_QPA_DEFAULT_PLATFORM variable set to Linux Framebuffer and if your hardware design supports something else you may want to change it. Or you can always control it thru QT_QPA_PLATFORM env. variable and leave default to simplest 'linuxfb'. You may also want to modify CFLAGS and CXXFLAGS here.
Set CROSS_COMPILE variable and source Xilinx tools settings:
Now we can run Qt 'configure' utility, Below, configuration from my building script. Notice I disabled OpenGL ES support since my hardware don't have it yet, but your might, so you may want to include egl support.
Configure will build 'qmake' first and generate 'Makefiles' for all the components. Check your output in details and verify it match your configuration. Below output in my case:
Configure summary
Building on: linux-g++ (x86_64, CPU features: mmx sse sse2)
Building for: devices/linux-arm-xilinx-zynq-g++ (arm, CPU features: neon)
Platform notes:
- Also available for Linux: linux-kcc linux-icc linux-cxx
qmake vars .......... styles += mac fusion windows DEFINES += QT_NO_MTDEV
DEFINES += QT_NO_LIBUDEV DEFINES += QT_NO_XCB sql-drivers = sql-plugins = sqlite qmake switches .........
Build options:
Configuration .......... accessibility audio-backend c++11 clock-gettime clock-monotonic compile_examples
concurrent cross_compile evdev eventfd freetype full-config getaddrinfo getifaddrs harfbuzz iconv inotify
ipv6ifname large-config largefile linuxfb medium-config minimal-config mremap neon nis no-pkg-config pcre
png posix_fallocate qpa qpa reduce_exports reduce_relocations release rpath shared small-config xkbcommon-qt zlib
Build parts ............ libs examples
Mode ................... release
Using C++11 ............ yes
Using PCH .............. no
Target compiler supports:
iWMMXt/Neon .......... no/yes
Qt modules and options:
Qt D-Bus ............... no
Qt Concurrent .......... yes
Qt GUI ................. yes
Qt Widgets ............. yes
JavaScriptCore JIT ..... yes (To be decided by JavaScriptCore)
QML debugging .......... no
Use system proxies ..... no
Support enabled for:
Accessibility .......... yes
ALSA ................... no
CUPS ................... no
FontConfig ............. no
FreeType ............... qt
HarfBuzz ............... qt
Iconv .................. yes
ICU .................... no
Image formats:
GIF .................. yes (plugin, using bundled copy)
JPEG ................. yes (plugin, using bundled copy)
PNG .................. yes (in QtGui, using bundled copy)
Glib ................... no
GTK theme .............. no
Large File ............. yes
mtdev .................. no
Networking:
getaddrinfo .......... yes
getifaddrs ........... yes
IPv6 ifname .......... yes
OpenSSL .............. no
NIS .................... yes
OpenGL ................. no
OpenVG ................. no
PCRE ................... yes (bundled copy)
pkg-config ............. no
PulseAudio ............. no
QPA backends:
DirectFB ............. no
EGLFS ................ no
KMS .................. no
LinuxFB .............. yes
XCB .................. no
Session management ..... yes
SQL drivers:
DB2 .................. no
InterBase ............ no
MySQL ................ no
OCI .................. no
ODBC ................. no
PostgreSQL ........... no
SQLite 2 ............. no
SQLite ............... yes (plugin, using bundled copy)
TDS .................. no
udev ................... no
xkbcommon .............. yes (bundled copy)
zlib ................... yes (bundled copy)
NOTE: Qt is using double for qreal on this system. This is binary incompatible against Qt 5.1.
Configure with '-qreal float' to create a build that is binary compatible with 5.1.
Info: creating cache file /home/d9/Projects/qt5_build_test/qt-everywhere-opensource-src-5.2.1/qtbase/.qmake.cache
Qt is now configured for building. Just run 'gmake'.
Once everything is built, you must run 'gmake install'.
Qt will be installed into /opt/Qt/5.2.1
Prior to reconfiguration, make sure you remove any leftovers from
the previous build.
Build and install Qt. It will be installed in a directory you set as a prefix during configuration.
cd qt-everywhere-opensource-src-5.2.1/qtbase/
gmake & gmake install
Now, lets add Qt libraries and couple of Qt example binaries to PetaLinux project. Go to your PetaLinux project directory and create Qt component using 'libs' template.
petalinux-create -t libs -n qt-5.2.1 --enable
We don't need template created files, so delete them.
cd components/libs/qt-5.2.1/
rm libqt*
Copy prebuilt Qt library files to 'lib' subdirectory, qt fonts and plugin directories also to 'lib' and a couple of Qt examples to 'bin' subdirectory:
We also have to set a few enviromental variables on a target rootfs, so lets create 'profile.qt-5.2.1' file. Last one is for 'tslib', so if you don't use it you may delete it. Also, depending on your setup - you may need to change this or add other variables here.
Now we have to modify our PetaLinux component Makefile. We got nothing to build, but need to install our Qt5 library files to target rootfs.
ifndef PETALINUX
$(error "Error: PETALINUX environment variable not set. Try to source the settings.sh file")
endif
include libs.common.mk
LIB=libqt_5_2_1
all: build install
.PHONY: build
build:
install:
#Install libraries and fonts to the rootfs.
mkdir -p $(TARGETDIR)/usr/lib
USER=your_user_name
GROUP=your_user_group
rsync -rav ./bin/* $(TARGETDIR)/usr/bin/
rsync -rav ./lib/* $(TARGETDIR)/usr/lib/
#Install the script to ensure the font directory is properly specified.
mkdir -p $(TARGETDIR)/etc/profile.d
cp profile.qt-5.2.1 $(TARGETDIR)/etc/profile.d/profile.qt-5.2.1
clean:
Last configuration step is to include 'libstdc++6' to target rootfs, since Qt is a C++ library and depends on it.
petalinux-config -c rootfs
Then go to 'Filesystem Packages' -> 'Base' -> 'External-xilinx-toolchain' -> Enable 'libstdc++6'.
Thats it. Rebuild PetaLinux project, transfer image.ub file to SD card. Qt5 library will add about 20M to image size, so it may not fit into reserved space and you may need to adjust appropriate u-boot variable (loadaddr, netstart...). After boot you we can run 'pathstroke' and 'mainwindow' Qt example apps.
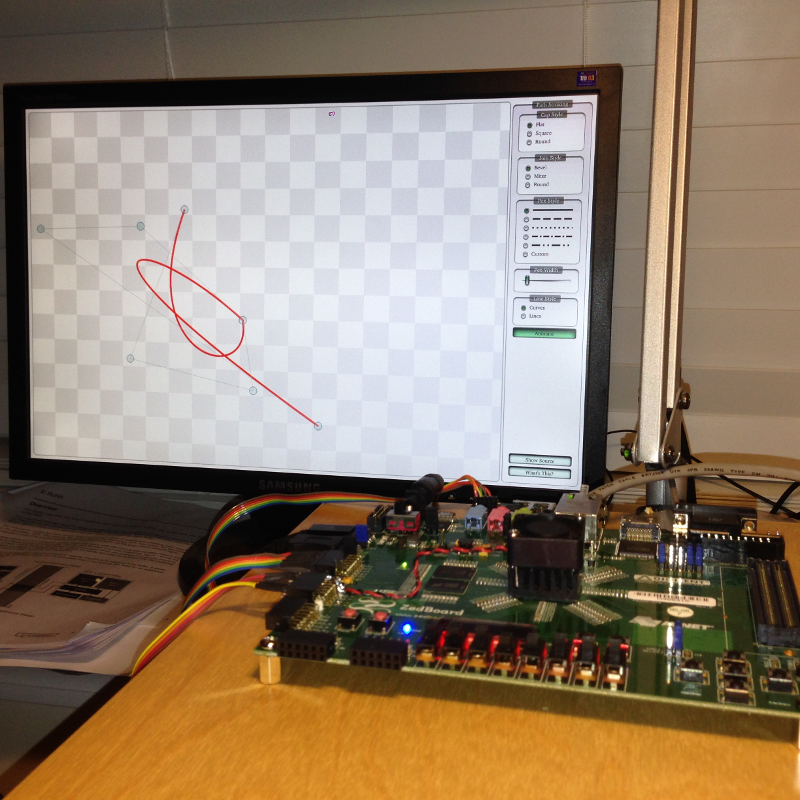
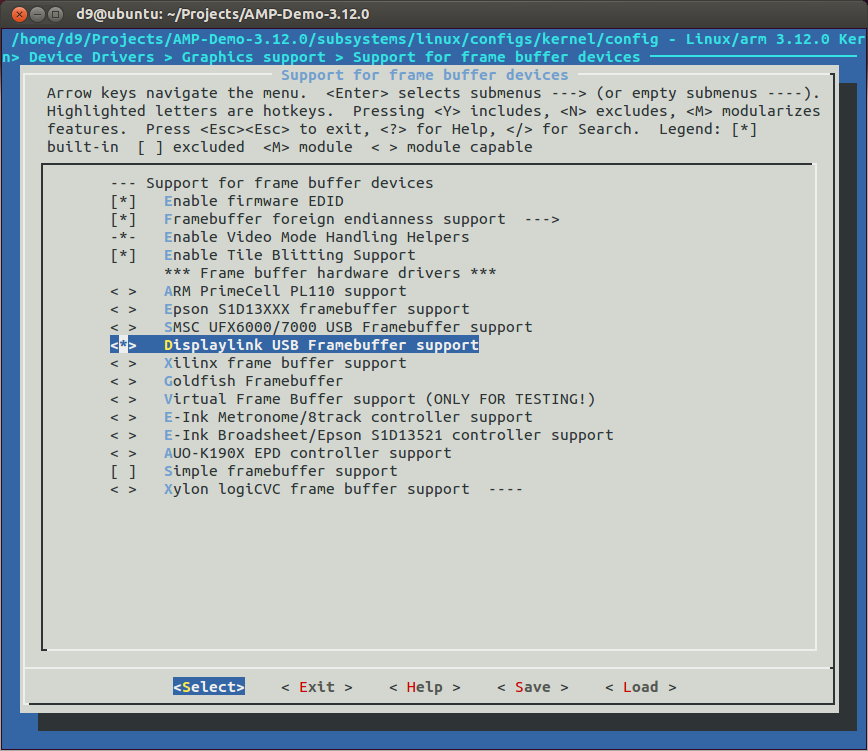
While waiting for my custom TFT panel board to be build and Zynq IP created, I'm decided to go ahead and build Qt libraries and start porting application. In order to test my application I need linux video framebuffer of any sort and easiest way to add screen to ZedBoard is to use DisplayLink Video USB-to-DVI adaptor. I got first generation of DisplayLink adaptor from Kengsington model K33907.
I did use Xilinx PetaLinux 13.10 under Ubuntu 13.10 and kernel v3.12.0 from Xilinx git repo: and I did reuse PetaLinux project I created using ZedBoard CTT hardware design from ZedBoard_CTT_v2013_2_130807 tutorial. But it works just as good with PetaLinux 13.10 default linux kernel 3.8.11.
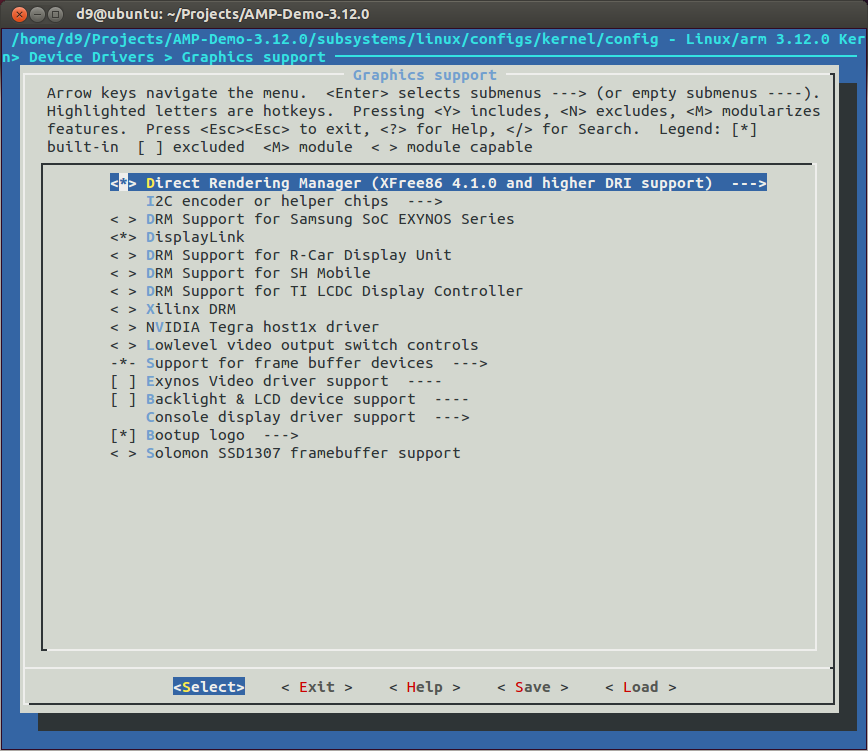
First, we need to reconfigure linux kernel to include a driver and enable some framebuffer related options. So, run kernel config utility, go to 'Device Drivers' -> 'Graphics support' and make appropriate changes:
cd ~/Projects/my_zedboard_petalinux_project/
petalinux-config -c kernel
Clean PetaLinux project from previous build and rebuild it:
petalinux-build -x mrproper
petalinux-build
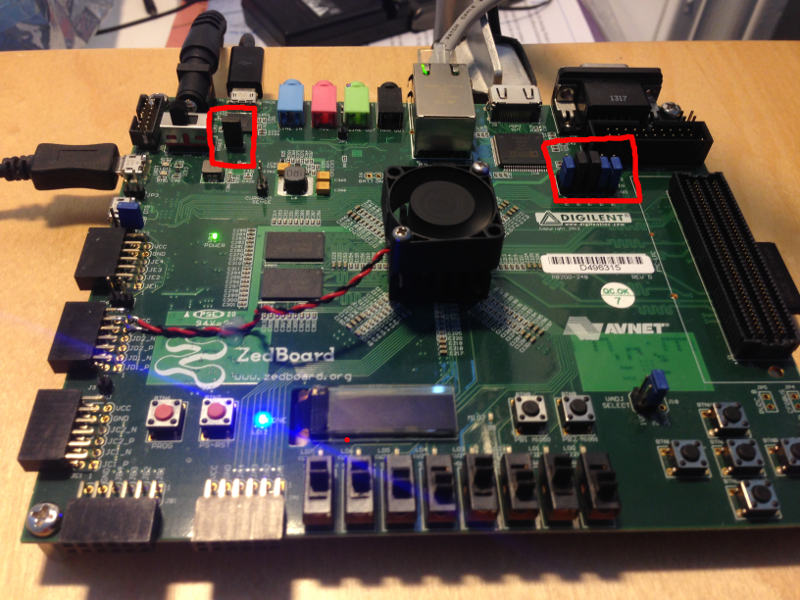
Connect DisplayLink USB adaptor to USB OTG port of ZedBoard.
Check JP2 and JP3 jumpers on the ZedBoard - both must be shorted to set USB in a Host mode.
Now transfer new image.ub to SD card if you using SD card. Or if you using 'tftp' to load kernel - just reset ZedBoard.
During boot process you should see something similar to the code below and if you do this means DisplayLink driver works, it found video adapter connected to USB, got EDID with modes from monitor and set appropriate mode. In my case it 1440x900 59Hz:
One of the many nice features of Xilinx Zynq is ability to run it in Asymmetric MultiProcessing or AMP configuration. Xilinx released version v2013.10 of a UG980(Petalinux Board Bringup) and UG978(Zynq Linux-FreeRTOS AMP) guides for Xilinx ZC702 board. Today I will follow those guides to build Linux-FreeRTOS solution for ZedBoard.
I already have Vivado and Xilinx SDK packages installed along with required, but initially missing packages on my Ubuntu 13.10 64 bit Virtual Machine.
First of all we will need so called Zynq 'Hardware Platform' which will satisfy both Linux and FreeRTOS minimum requirements.
Linux requires one UART and at least one storage peripheral, for example SD Card. And FreeRTOS also requires one UART and also a Timer.
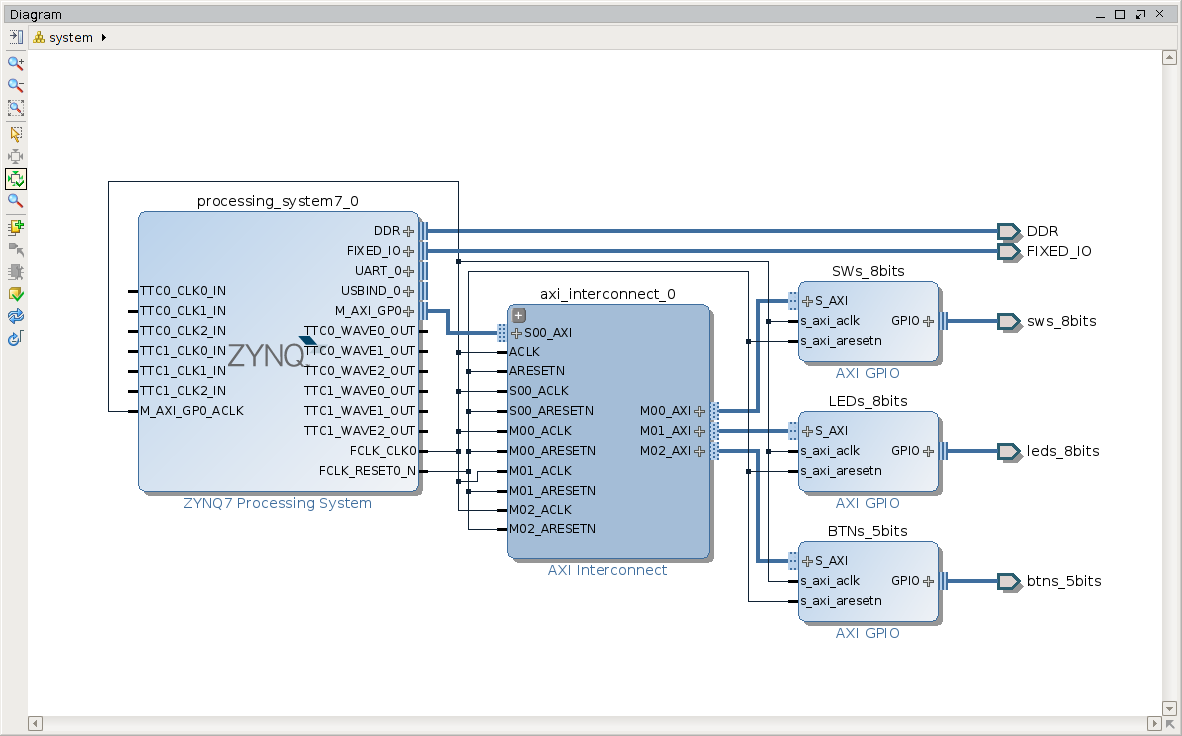
So, I will modify ZedBoard CTT hardware design I created using ZedBoard_CTT_v2013_2_130807 tutorial. That 'Hardware Platform', in addition to base system, consist of 8 switches, 8 led's and 5 push buttons and I will activate 1 more UART and 1 more timer for FreeRTOS.
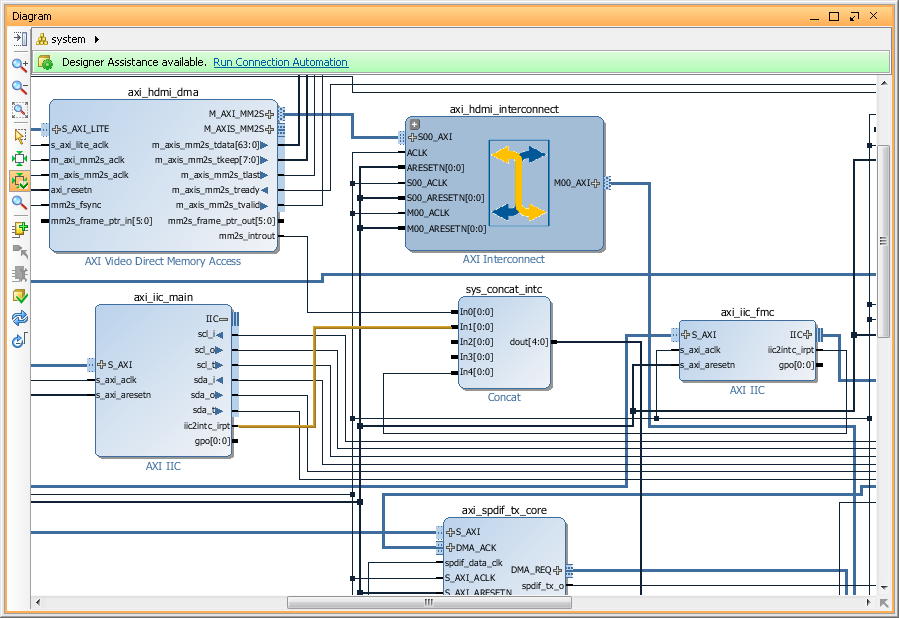
Open Vivado ZedBoard CTT project or create it from scratch using ZedBoard CTT tutorial. I called my project 'ZedBoard-AMP' and made next 2 modifications to CTT design:
Zynq7 Processing System: MIO Configuration: I/O Peripherals: Enable UART0 and set its IO as 'EMIO'.
Zynq7 Processing System: MIO Configuration: Application Processor Unit: Enable Timer1 and set its IO as 'EMIO'.
As a result I got the system with the such 'Block Diagram':
Run Synthesis, Implementation, generate new BitStream and Export new 'Hardware' to SDK. I prefer not to lauch SDK right away for a good reason - you have to source Xilinx SDK settings and/or PetaLinux settings before running XSDK. After export finished we can close Vivado.
Lets set required settings and run Xilinx SDK (XSDK). Set 'Eclipse' workspace to our ~/Projects/ directory.
mkdir Projects
cd Projects
source /opt/Xilinx/Vivado/2013.4/settings64.sh
xsdk
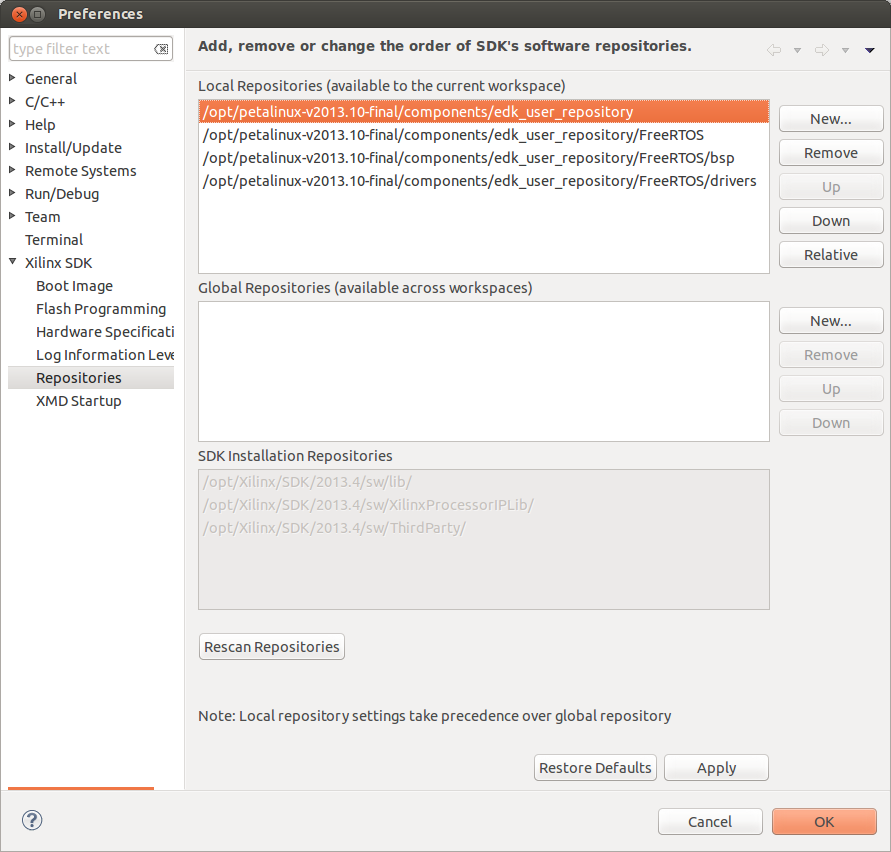
We need to add PetaLinux and FreeRTOS repositories to XSDK. In XSDK -> Xilinx Tools -> 'Xilinx SDK' -> 'Repositories' -> add 'Local Repositories' from your PetaLinux 13.10 components folder. In my case PetaLinux installed into '/opt/petalinux-v2013.10-final/'. So added repo's are:
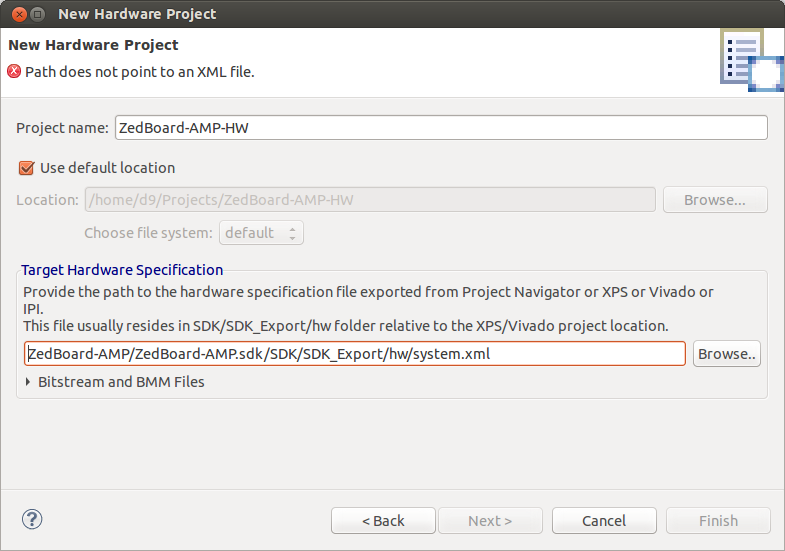
Create 'Hardware Platform Specification' project using 'Hardware Platfrom' exported from our ZedBoard-AMP Vivado project. I named it 'ZedBoard-AMP-HW'.
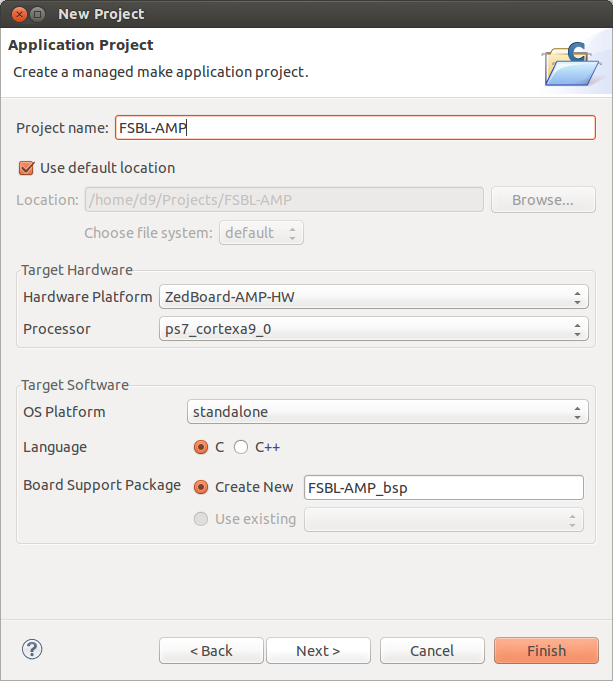
Create FSBL for AMP configuration using File -> New Project -> Application Project. I named it FSBL-AMP and selected 'ZedBoard-AMP-HW' as Hardware Platform, 'ps7_cortex9_0' as a Processor, 'standalone 'OS Platfrom ', after clicking 'Next' select 'Zynq FSBL' template and finish project creation. Compile both 'FSBL-AMP_bsp' and 'FSBL-AMP' projects if it didnt autobuilt.
Now we will need to build a few PetaLinux projects, but before we can do this, we have to quit XSDK and source some PetaLinux settings. So, close XSDK, apply settings in next order and launch XSDK again:
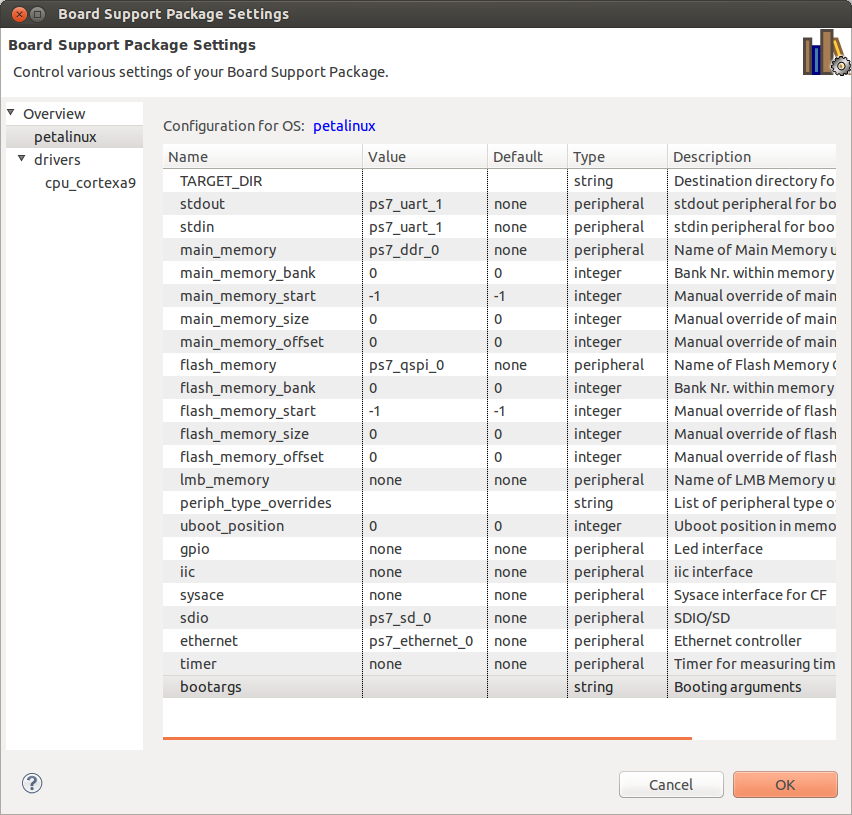
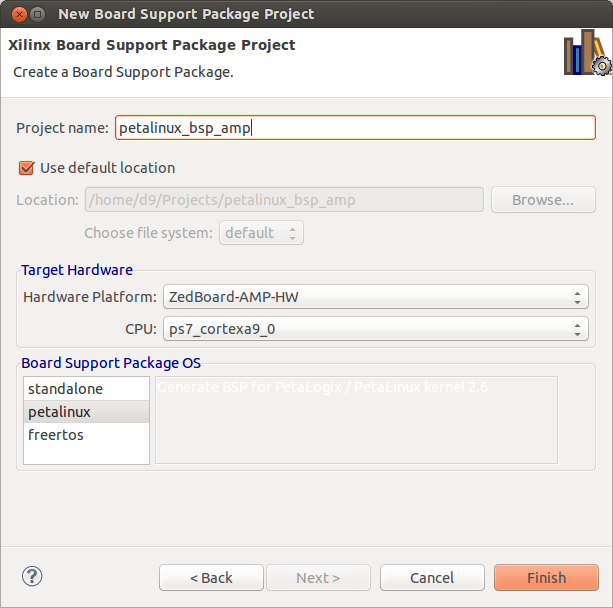
Create PetaLinux BSP project. In SDK select File -> New -> Project -> 'Board Support Package'. Name it 'petalinux_bsp_amp'. Select 'ZedBoard-AMP-HW' as Hardware Platform, CPU 'ps7_cortexa9_0'. Board Support Package OS 'petalinux'. Then Finish.
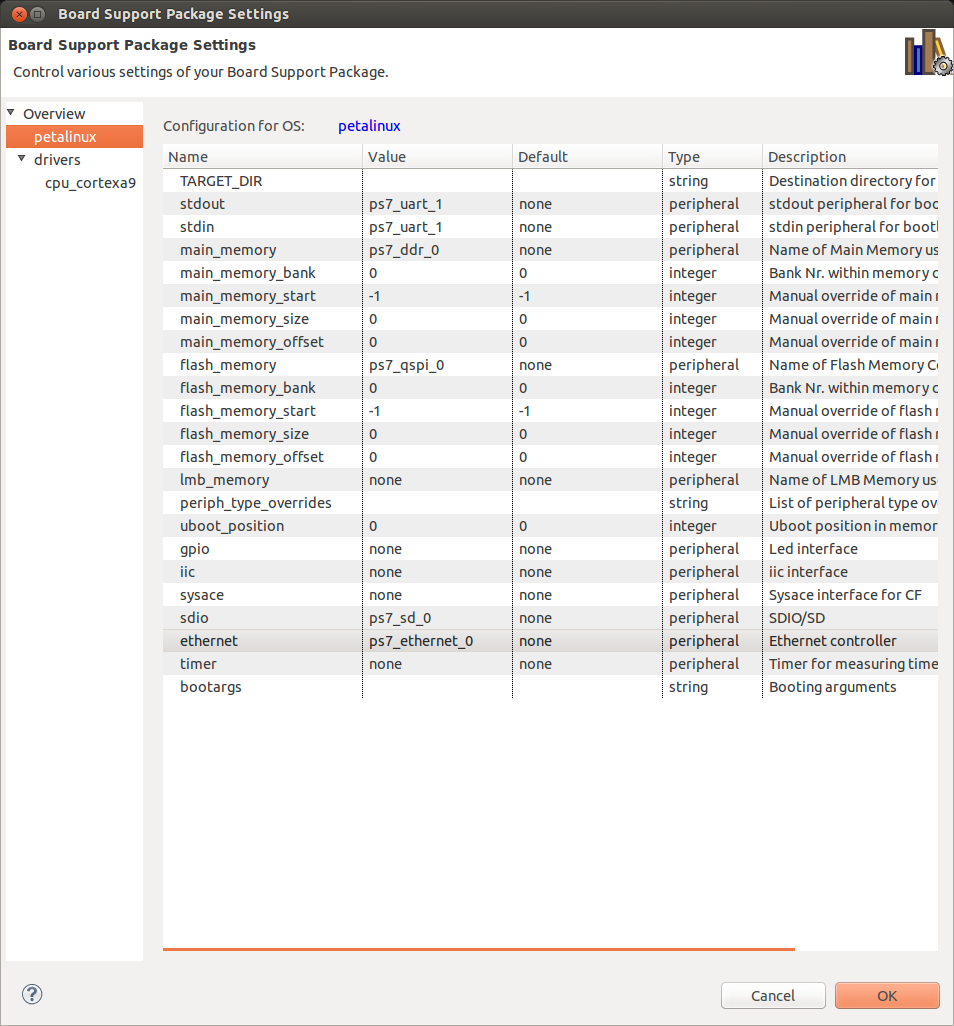
XSDK should automatically open 'Board Support Package Settings' page. Go to 'Overview' -> 'petalinux' menu of that page and set:
'ps7_uart_1' for stdout and stdin.
'ps7_ddr_0' for main memory.
'ps7_qspi' for flash memory.
'ps7_sd_0' for sdio.
'ps7_ethernet' for ethernet.
Build this project.
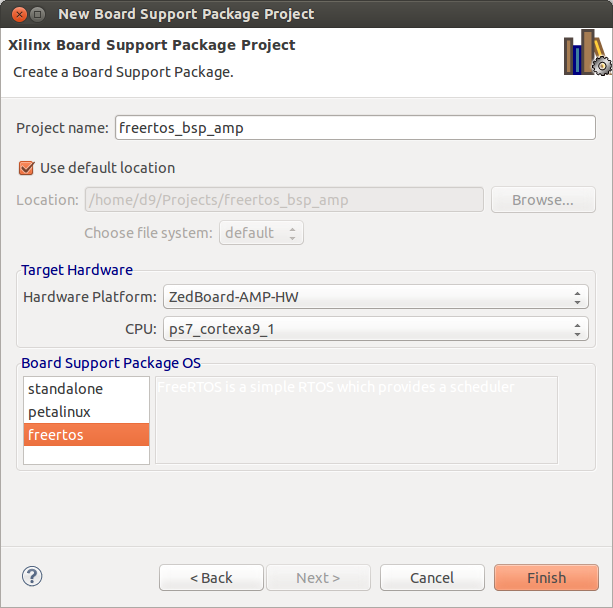
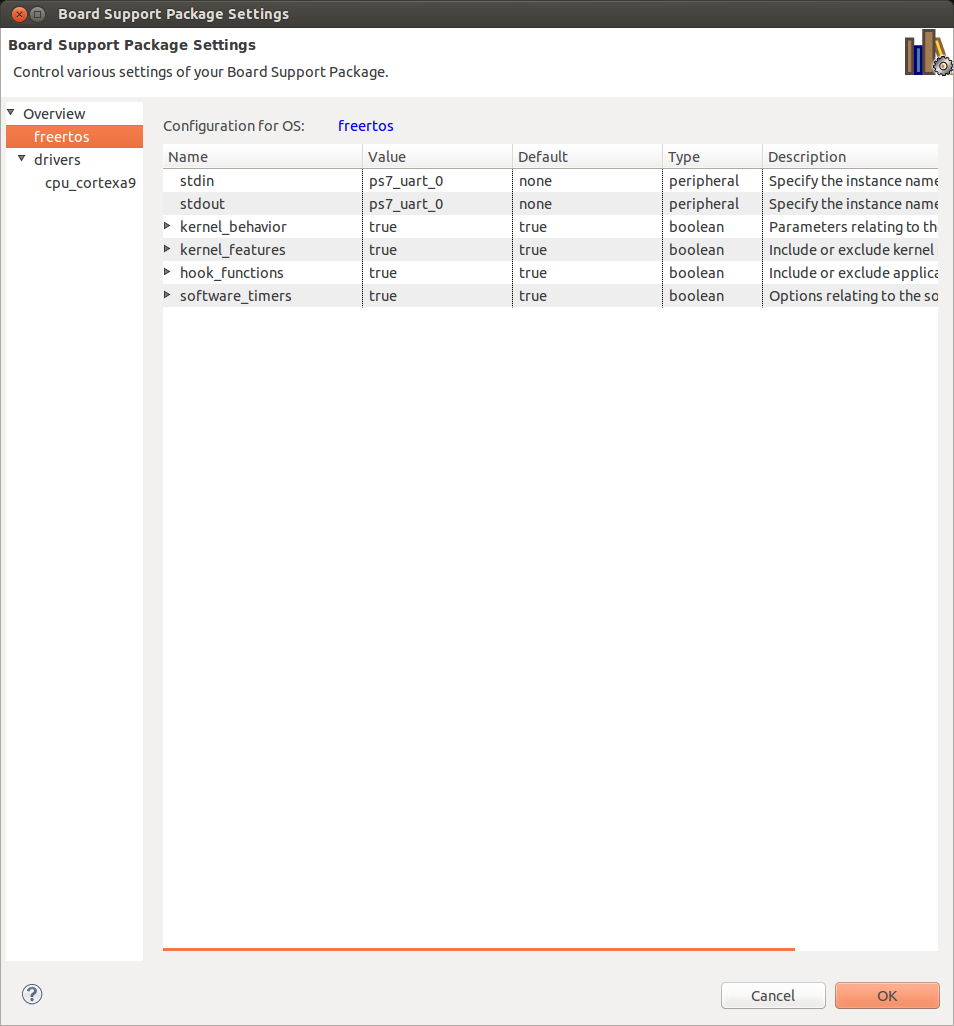
Create FreeRTOS BSP project. In SDK select File -> New -> Project -> 'Board Support Package'. Name it 'freertos_bsp_amp'. Select 'ZedBoard-AMP-HW' as Hardware Platform, CPU 'ps7_cortexa9_1'. Board Support Package OS 'freertos'. Then Finish.
XSDK will automatically open 'Board Support Package Settings' page now for FreeRTOS project. Then:
'Overview' -> 'freertos' -> Set 'ps7_uart_0' for both stdin and stdout.
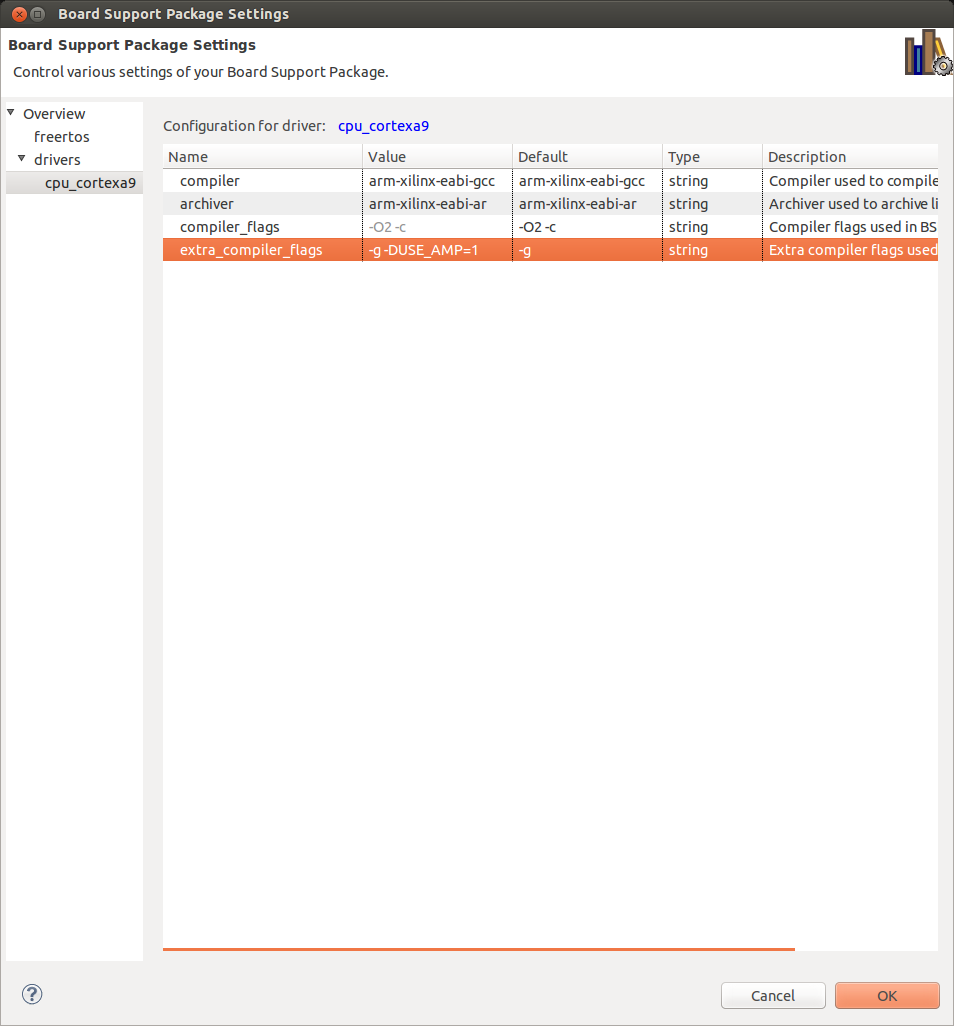
'drivers' -> 'cpu_cortexa9' -> Set 'extra_compiler_flags' to '-g -DUSE_AMP=1'.
This flag will enable AMP specific features in the FreeRTOS firmware. Hit Ok. And build this project too if it not built automatically.
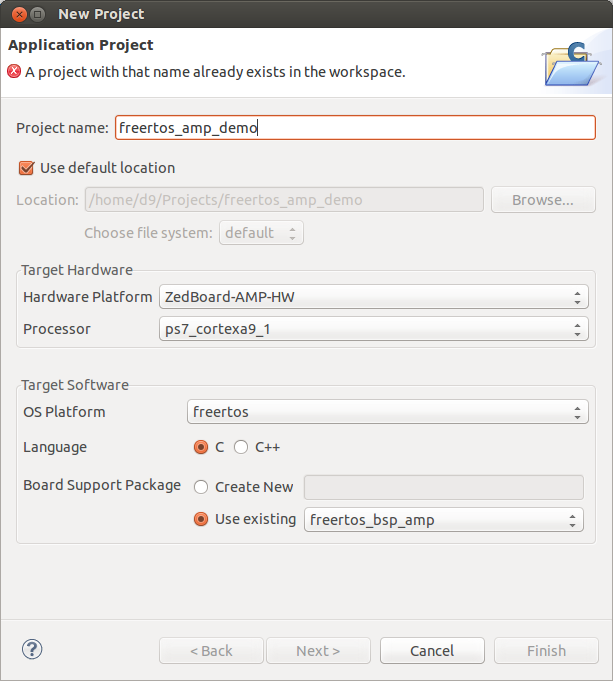
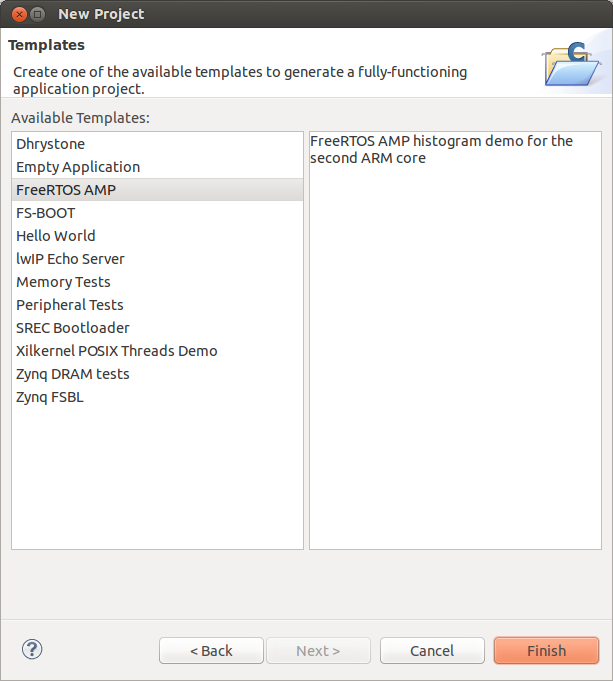
Create FreeRTOS test applications project. In SDK select File -> New -> Project -> 'Application Project'. Name it 'freertos_amp_demo'. Select 'ZedBoard-AMP-HW' as Hardware Platform, Processor 'ps7_cortexa9_1', OS Platfrom 'freertos', for Board Support Package select 'Use existing' -> then our 'freertos_bsp_amp' project. Click 'Next' and select 'FreeRTOS AMP' template. Click 'Finish'. And build it.
We are done with XSDK for now. Close it.
Now we have to create PetaLinux 'project'. And I will name it 'AMP-Demo'.
INFO: Create project: AMP-Demo
INFO: New project successfully created in /home/d9/Projects/AMP-Demo
Next step is to adjust our PetaLinux configuration to match our unique 'Hardware Platform' we created using Vivado - 'ZedBoard-AMP'. But we have to do it using BSP we created for our 'Hardware Platform' - 'petalinux_bsp_amp'. So, in a ~/Projects directory:
cd petalinux_bsp_amp/
petalinux-config --get-hw-description -p ../AMP-Demo/
INFO: Checking component...
INFO: Getting hardware description...
INFO: Using MSS file /home/d9/Projects/petalinux_bsp_amp/system.mss and XML file /home/d9/Projects/petalinux_bsp_amp/../ZedBoard-AMP-HW/system.xml
INFO: Copy autoconfig for PetaLinux project: /home/d9/Projects/AMP-Demo
INFO: Merging platform settings into kernel configuration
Auto-config file successfully updated for PetaLinux project: /home/d9/Projects/AMP-Demo
[INFO ] generate /home/d9/Projects/AMP-Demo/subsystems/linux/hw-description/system.dts
Verify, that we got the right configuration. In particular, amount of DDR memory - it should be 512M or 0x20000000. Below 'subsystems/linux/hw-description/xparameters.h' file generated in my case:
/*
* (C) Copyright 2007-2008 Michal Simek
*
* Michal SIMEK <monstr@monstr.eu>
*
* CAUTION: This file is automatically generated by libgen.
* Version: Xilinx EDK 2013.4 EDK_2013.4.20131205
* Generate by U-BOOT v4.00.c
* Project description at http://www.monstr.eu/uboot/
*/
#define XILINX_BOARD_NAME "AMP-Demo"
/* ARM is ps7_cortexa9_0 */
#define XPAR_CPU_CORTEXA9_CORE_CLOCK_FREQ_HZ 666666687
/* Interrupt controller is ps7_scugic_0 */
#define XILINX_PS7_INTC_BASEADDR 0xf8f00100
/* System Timer Clock Frequency */
#define XILINX_PS7_CLOCK_FREQ 333333343
/* Uart console is ps7_uart_1 */
#define XILINX_PS7_UART
#define XILINX_PS7_UART_BASEADDR 0xe0001000
#define XILINX_PS7_UART_CLOCK_HZ 50000000
/* IIC doesn't exist */
/* GPIO doesn't exist */
/* SDIO controller is ps7_sd_0 */
#define XILINX_PS7_SDIO_BASEADDR 0xe0100000
/* Main Memory is ps7_ddr_0 */
#define XILINX_RAM_START 0x00000000
#define XILINX_RAM_SIZE 0x20000000
/* Flash Memory is ps7_qspi_0 */
#define XILINX_PS7_QSPI_FLASH_BASEADDR 0xE000D000
#define XILINX_SPI_FLASH_MAX_FREQ 50000000
#define XILINX_SPI_FLASH_CS 0
/* Sysace doesn't exist */
/* Ethernet controller is ps7_ethernet_0 */
#define XILINX_PS7_GEM_BASEADDR 0xe000b000
Next step is to configure our PetaLinux project. AMP system share memory between Linux Kernel and FreeRTOS, so PetaLinux project must be configured to segment the memory and lets split it 256M/256M since our ZedBoard have 512M total of DDR3 memory. I will also change boot media type to SD Card, Host and Product names. So, run petalinux-config and make next this changes:
cd ~/Projects/AMP-Demo/
petalinux-config
Time to configure Linux Kernel for AMP. In a project directory:
petalinux-config -c kernel
In a main page:
Make sure that 'Enable loadable module support' is selected.
In 'Kernel Features' -> make sure that 'High Memory Support' is enabled.
In 'Kernel Features' -> change 'Memory split' to '2G/2G'.
In 'Device Drivers' -> 'Generic Driver Options' -> make sure 'Userspace firmware loading support' is enabled.
In 'Device Drivers' -> 'Remoteproc drivers(EXPERIMENTAL)' -> change 'ZYNQ remoteproc' to (module) and disble Microblaze support.
In 'Device Drivers' -> 'Rpmsg drivers(EXPERIMENTAL)' -> set all three modules to ('An rpmsg server sample', 'rpmsg OMX driver' and 'An FreeRTOS statistic')
Save changes and quit from menuconfig.
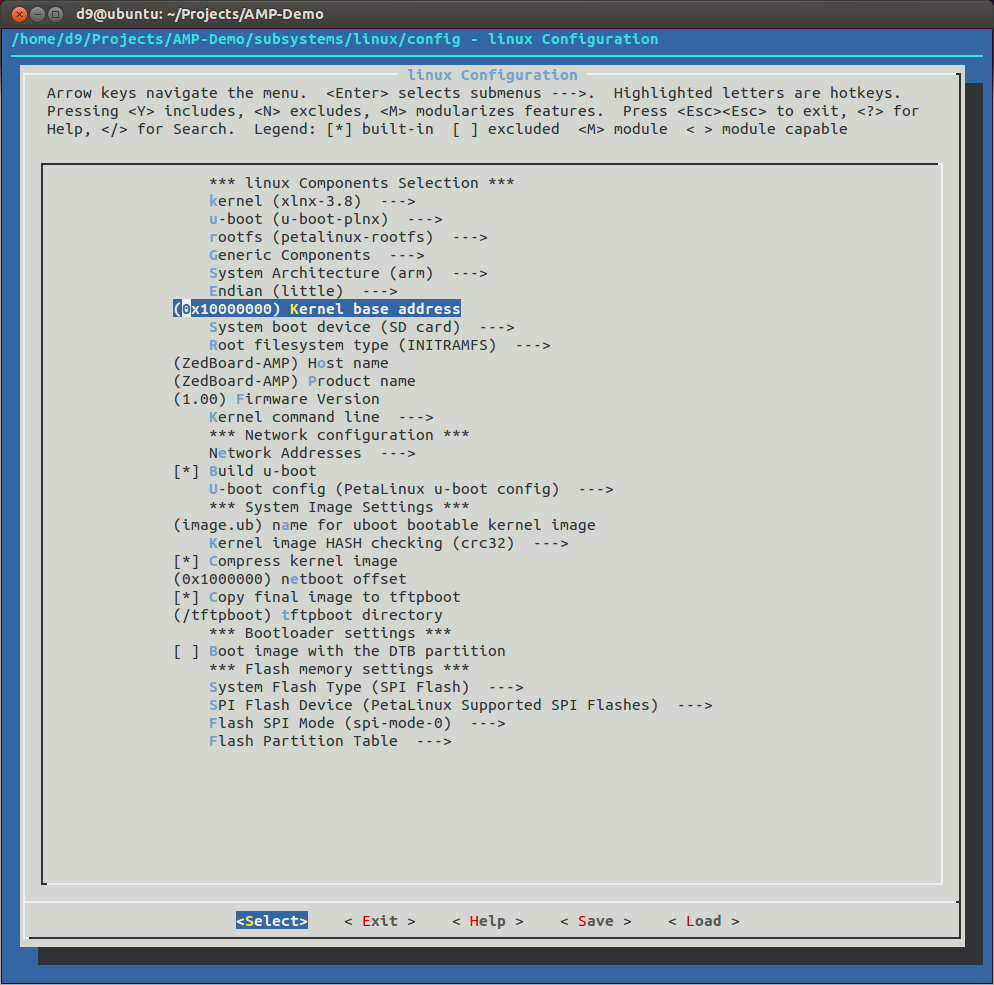
Configure PetaLinux project ROOTFS. All we need to change now is to in 'Apps-->' menu add/enable 'latencystat' app.
petalinux-config -c rootfs
Next very important step is to update 'Device Tree Source'(DTS). We need it to do because 'remoteproc' driver instantianated and configured by its node in a device tree.
DTS file we need to modify located in a our petalinux project 'AMP-Demo/subsystems/linux/hw-description/system.dts'. We have to add 'remoteproc' node to 'ps7_axi_interconnect_0' device. Below a portion of my system.dts file. More details regarding 'remoteproc' you can find in a Xilinx UG978 v2013.10:
Now, with PetaLinux configured, we can add our FreeRTOS demo app we created and compiled using XSDK into PetaLinux rootfs image. In order to do it we can create PetaLinux app using template.
cd ~/Projects/AMP-Demo/
petalinux-create -t apps --template install -n freertos_fw
INFO: Create apps: freertos_fw
INFO: New apps successfully created in /home/d9/Projects/AMP-Demo/components/apps/freertos_fw
Copy our FreeRTOS compiled app into PetaLinux apps directory:
cd ~/Projects/AMP-Demo/components/apps/freertos_fw/
cp ../../../../freertos_amp_demo/Debug/freertos_amp_demo.elf data/freertos
Modify 'install' section of Makefile in the app folder:
ifndef PETALINUX
$(error "Error: PETALINUX environment variable not set. Change to the root of your PetaLinux install, and source the settings.sh file")
endif
include $(PETALINUX)/components/apps/apps.common.mk
all: build install
build:
clean:
.PHONY: install image
install:
$(TARGETINST) -d data/freertos /lib/firmware/freertos
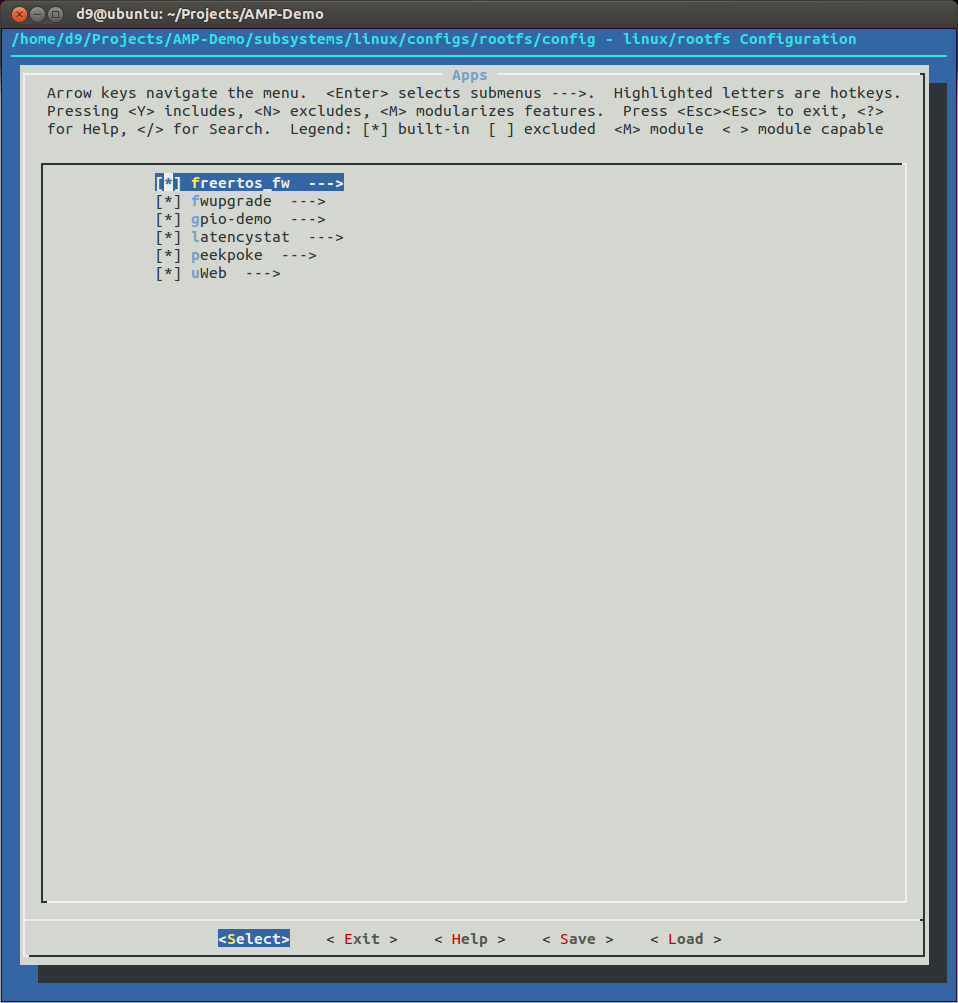
Configure PetaLinux 'rootfs' to include this new 'freertos_fw' in 'Apps-->' menu:
cd ~/Projects/AMP-Demo/
petalinux-config -c rootfs
Build PetaLinux project, create BOOT.BIN image using our 'FSBL-AMP' and 'ZedBoard-AMP' bitstream file. Create/update prebuilt configuration.
Copy BOOT.BIN and image.ub to sd card, set ZedBoard MIO3, MIO4 and MIO5 to 'SD Boot' configuration and turn ZedBoard on.
Login as 'root'/'root' and verify our kernel version and build timestamp.
root@ZedBoard-AMP:~# uname -a
Linux ZedBoard-AMP 3.8.11 #2 SMP PREEMPT Wed Feb 26 15:39:37 EST 2014 armv7l GNU/Linux
root@ZedBoard-AMP:~#
Because we included remoteproc as a module and it not loaded yet - Linux must be using both CPU's in a conventional SMP way. Lets verify it:
more /proc/cpuinfo
processor : 0
model name : ARMv7 Processor rev 0 (v7l)
BogoMIPS : 1332.01
Features : swp half thumb fastmult vfp edsp neon vfpv3 tls
CPU implementer : 0x41
CPU architecture: 7
CPU variant : 0x3
CPU part : 0xc09
CPU revision : 0
processor : 1
model name : ARMv7 Processor rev 0 (v7l)
BogoMIPS : 1332.01
Features : swp half thumb fastmult vfp edsp neon vfpv3 tls
CPU implementer : 0x41
CPU architecture: 7
CPU variant : 0x3
CPU part : 0xc09
CPU revision : 0
Hardware : Xilinx Zynq Platform
Revision : 0000
Serial : 0000000000000000
Now, lets load remoteproc driver:
modprobe zynq_remoteproc
CPU1: shutdown
remoteproc0: 0.remoteproc-test is available
remoteproc0: Note: remoteproc is still under development and considered experimental.
remoteproc0: THE BINARY FORMAT IS NOT YET FINALIZED, and backward compatibility isn't yet guaranteed.
modprobe rpmsg_freertos_statistic
remoteproc0: powering up 0.remoteproc-test
remoteproc0: Booting fw image freertos, size 2130820
remoteproc0: remote processor 0.remoteproc-test is now up
virtio_rpmsg_bus virtio0: rpmsg host is online
virtio_rpmsg_bus virtio0: creating channel rpmsg-timer-statistic addr 0x50
rpmsg_freertos_statistic rpmsg0: new channel: 0x400 -> 0x50!
So, second Processor unloaded from Linux and is setup to execute the FreeRTOS firmware.
Now, we can run 'latencystat' FreeRTOS demo app.
latencystat -b
Linux FreeRTOS AMP Demo.
0: Command 0 ACKed
1: Command 1 ACKed
Waiting for samples...
2: Command 2 ACKed
3: Command 3 ACKed
4: Command 4 ACKed
-----------------------------------------------------------
Histogram Buckvirtio_rpmsg_bus virtio0: msg received with no recepient
et Values:
Bucket 341 ns (38 ticks) had 14813 frequency
Bucket 431 ns (48 ticks) had 1 frequency
Bucket 521 ns (58 ticks) had 1 frequency
Bucket 593 ns (66 ticks) had 1 frequency
Bucket 692 ns (77 ticks) had 1 frequency
-----------------------------------------------------------
Histogram Data:
min: 341 ns (38 ticks)
avg: 341 ns (38 ticks)
max: 692 ns (77 ticks)
out of range: 0
total samples: 14817
-----------------------------------------------------------
root@ZedBoard-AMP:~#
Access the TraceBuffer - a section of shared memory which is only written to by the FreeRTOS application. This
TraceBuffer used as a logging console to transfer information to Linux and 'latencystat' app uses it. So, lets check it out:
more /sys/kernel/debug/remoteproc/remoteproc0/trace0
Congratulation! We got Linux-FreeRTOS AMP configuration running on our ZedBoard.
Up until now, I was using JTAG to boot my ZedBoard using PetaLinux builds. But at some point we will neet to switch to QSPI or SDCard. This post will be about using SD Card. And PetaLinux 13.10 made this process very easy. For default U-boot 2013.07 all we need to do is to change boot device in PetaLinux configurations.
I will use Avnet-Digilent-ZedBoard-2013.3 project I used before. See here for more details about how to install it:
First, go to your project directory and run petalinux-config tool
d9@ubuntu:~$ cd Projects/Avnet-Digilent-ZedBoard-2013.3/
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-config
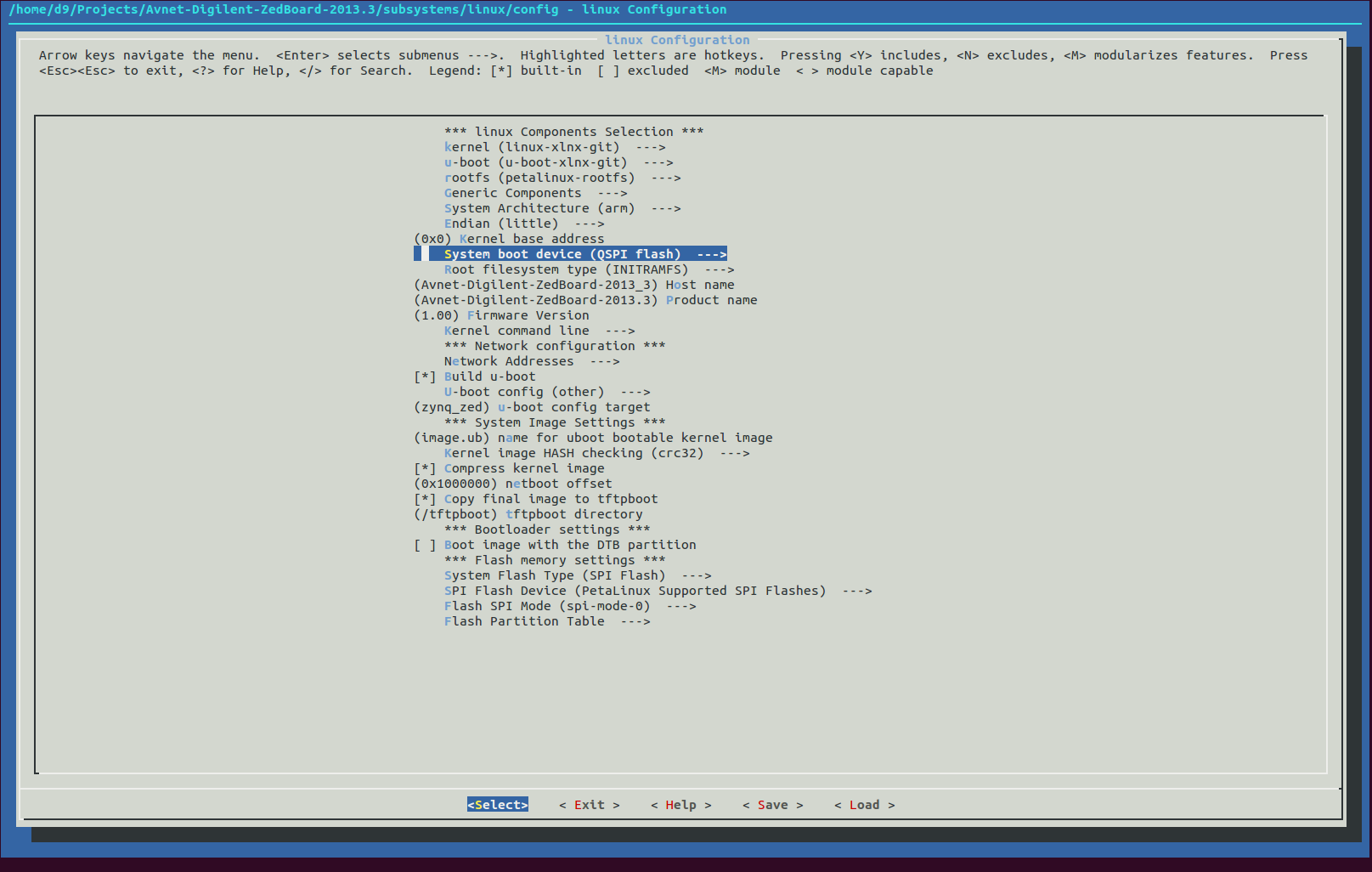
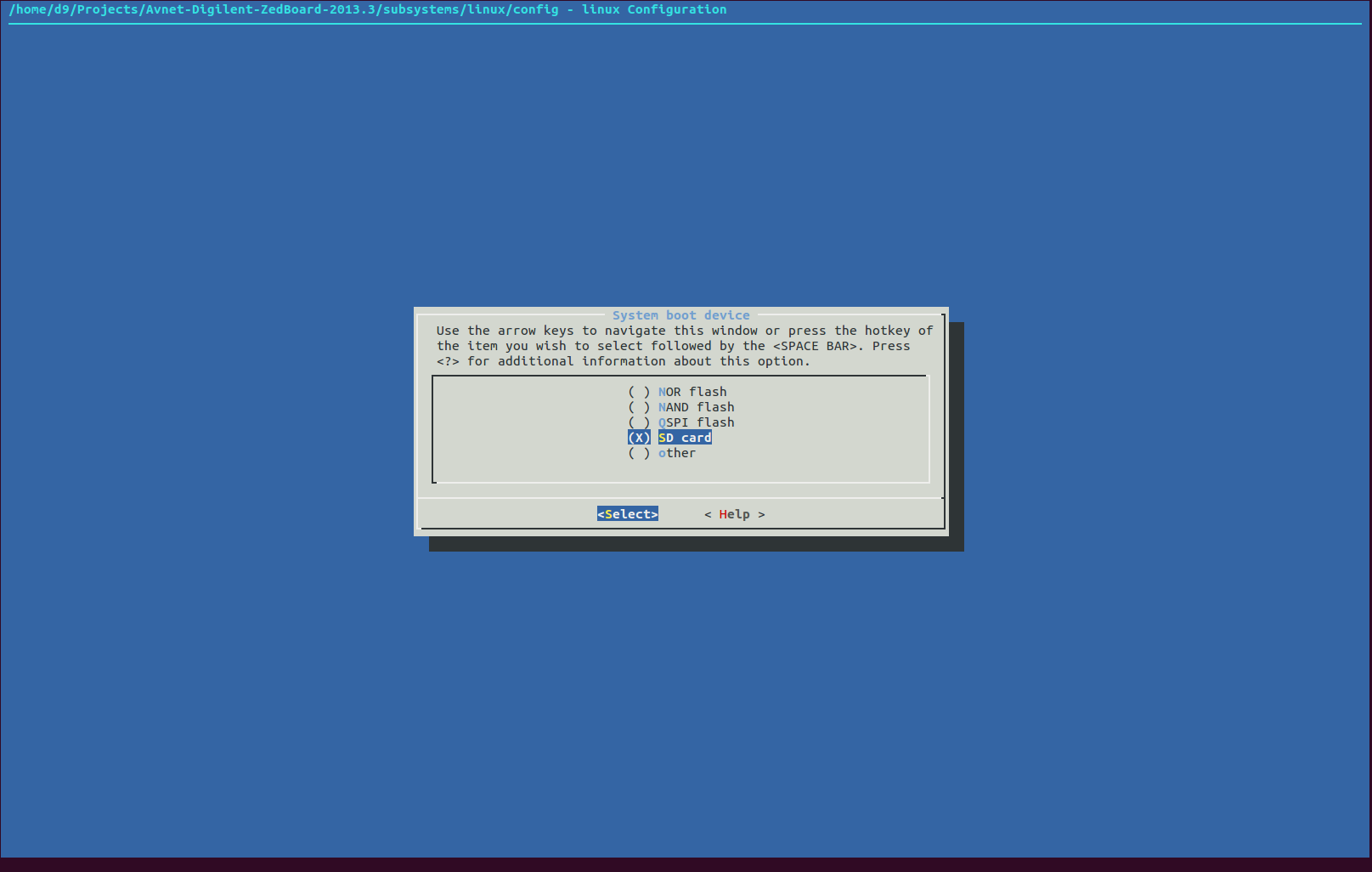
In a main manu select 'System boot device' submenu.
Inside 'System boot device' menu switch to 'SD card' option.
Save configuration and exit.
Now, lets clean and rebuild images - in our project directory:
petalinux-build -x mrproper
petalinux-build
To Re-generate BOOT.BIN in our project directory run:
INFO: Generating zynq binary package BOOT.BIN...
INFO: Binary is ready.
Copy BOOT.BIN and image.ub from our project Avnet-Digilent-ZedBoard-2013.3/images/linux directory to SD card. And we done. Umount SD card, install it into ZedBoard, set jumpers to SDCard boot mode (MIO3 to ground position, MIO4 and MIO5 to high) and power board.
Run gtkterm to monitor the process.
Btw, if you expireince 20-40 seconds delay before you can access port with error "cannot open /dev/ttyACM0: Device or resource busy" and/or sometimes U-boot process stopped without any error and will continue to boot when you type 'boot' command - you may want to uninstall Ubuntu's ModemManager which cause all this things by trying to access/control our port once it powered.
PetaLinux 13.10 coming with U-boot vesrion 2013.07 and Linux Kernel 3.8.1. If for some reason you need to change U-boot and/or Linux kernel with newer one - u can do it manually(configure, compile and include to BOOT.BIN image) or using PetaLinux tools to automate it. This post will be about later.
I will do it on virtual machine (VMWare Workstation 10) running Ubuntu 13.10 64 bit version with PetaLinux 13.10 already installed. I will also use fresh installation of prebuilt Avnet-Digilent BSP for ZedBoard, but this recipe works for my custom "hardware design" for ZedBoard too.
So, since I'm using 64 bit Ubuntu, I'm missing quite a few packages, especially 32bit versions. Below the list, but some package uninstalled my 64 version of GCC, so I re-install it as a last step.
Also, gmake package for Ubuntu not exist, but some Xilinx tools relay on it, so lets gmake symlink to make:
sudo ln -s /usr/bin/make /usr/bin/gmake
We also have to source PetaLinux settings, but because I'm always forget to do it - I will change my .bashrc so it will be done automatically, each time I log in. SO, in home directory, add next instructions to the end of the ~/.bashrc file.
Next, download 'petalinux-v2013.10-final-installer.run' from Xilinx website and put in ~/Downloads directory.
Now, let's create 'Projects' forlder for our PetaLinux projects and install Avnet-Digilent BSP project into it. It will create 2 projects for us: Vivado 13.3 and ISE-14.7. I will use Vivado one and we can delete 14.7.
INFO: Create project:
INFO: Projects:
INFO: * Avnet-Digilent-ZedBoard-14.7
INFO: * Avnet-Digilent-ZedBoard-2013.3
INFO: has been successfully installed to /home/d9/Projects/
INFO: New project successfully created in /home/d9/Projects/
d9@ubuntu:~/Projects$ cd Avnet-Digilent-ZedBoard-2013.3/
Let's test prebuilt packages using JTAG on our ZedBoard. Set MIO3, MIO4 and MIO5 jumpers on ZedBoard to JTAG boot(all to GND), turn board on, run 'gtkterm' (use ZedBoard USB-to-Serial port) and boot using petalinux-boot. Below output I got on my ZedBoard:
As you can see very first in a log is U-boot version and build timestamp: U-Boot 2013.07 (Nov 21 2013 - 18:27:09).
Loging as 'root'/'root' and check what version of kernel we got. It's 3.8.11 and it built on Thu Nov 21 18:30:11 EST 2013.
root@Avnet-Digilent-ZedBoard-2013_3:~# uname -a
Linux Avnet-Digilent-ZedBoard-2013_3 3.8.11 #2 SMP PREEMPT Thu Nov 21 18:30:11 EST 2013 armv7l GNU/Linux
Now, let's verify that we can reconfigure and rebuild existing kernel, uboot and rootfs. Run petalinux-config for each one, but don't change any settings yet. Just go thru menus if you like and exit. If you got any errors - most likely your installation missing some packages.
Now, we need to generate BOOT.BIN which includes our hardware implementation bitstream, FSBL and U-boot. Bitstream and FSBL executable are the same, so we will point them to petalinux tool and it will use just built u-boot exec. By default tool will put BOOT.BIN in current directory, but we need it to be in images directory. I will also force to replace file if it exists.
Now we are ready to boot our rebuilt images using JTAG. So, reset ZedBoard (with JP13 shorted) or repower and run. Verify that we have same version of U-boot (2013.07) and Kernel 3.8.11, but build date is new.
INFO: The image provided is a zImage and no addition options were provided
INFO: Append dtb - /home/d9/Projects/Avnet-Digilent-ZedBoard-2013.3/pre-built/linux/images/system.dtb and other options to boot zImage
INFO: Configuring the FPGA...
INFO: FPGA configuration completed.
INFO: Downloading FSBL
INFO: FSBL download completed.
INFO: Launching XMD for file download and boot.
INFO: This may take a few minutes, depending on the size of your image.
U-Boot 2013.07 (Feb 19 2014 - 14:43:34)
Linux Avnet-Digilent-ZedBoard-2013_3 3.8.11 #2 SMP PREEMPT Wed Feb 19 14:45:59 EST 2014 armv7l GNU/Linux
Now, lets download new versions of U-boot and Linux kernel for Xilinx Git repository. More about Xilinx repo you can read on
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ cd /opt/linux-xlnx-git/
d9@ubuntu:/opt/linux-xlnx-git$ git describe
xilinx-v2013.4
VERSION = 3
PATCHLEVEL = 12
SUBLEVEL = 0
EXTRAVERSION =
NAME = One Giant Leap for Frogkind
d9@ubuntu:/opt/linux-xlnx-git$ cd /opt/u-boot-xlnx-git/
d9@ubuntu:/opt/u-boot-xlnx-git$ git describe
xilinx-v2013.4
d9@ubuntu:/opt/u-boot-xlnx-git$ more Makefile
VERSION = 2013
PATCHLEVEL = 10
SUBLEVEL =
EXTRAVERSION =
So, for what its worth, for Kernel we got Git tag version 2013.4 and Makefile saying its 3.12.0. And for U-boot Git tag is 2013.4 and Makefile 2013.10.
Now we can copy Linux Kernel and U-Boot sources into our PetaLinux projects, but first we have to create some directories
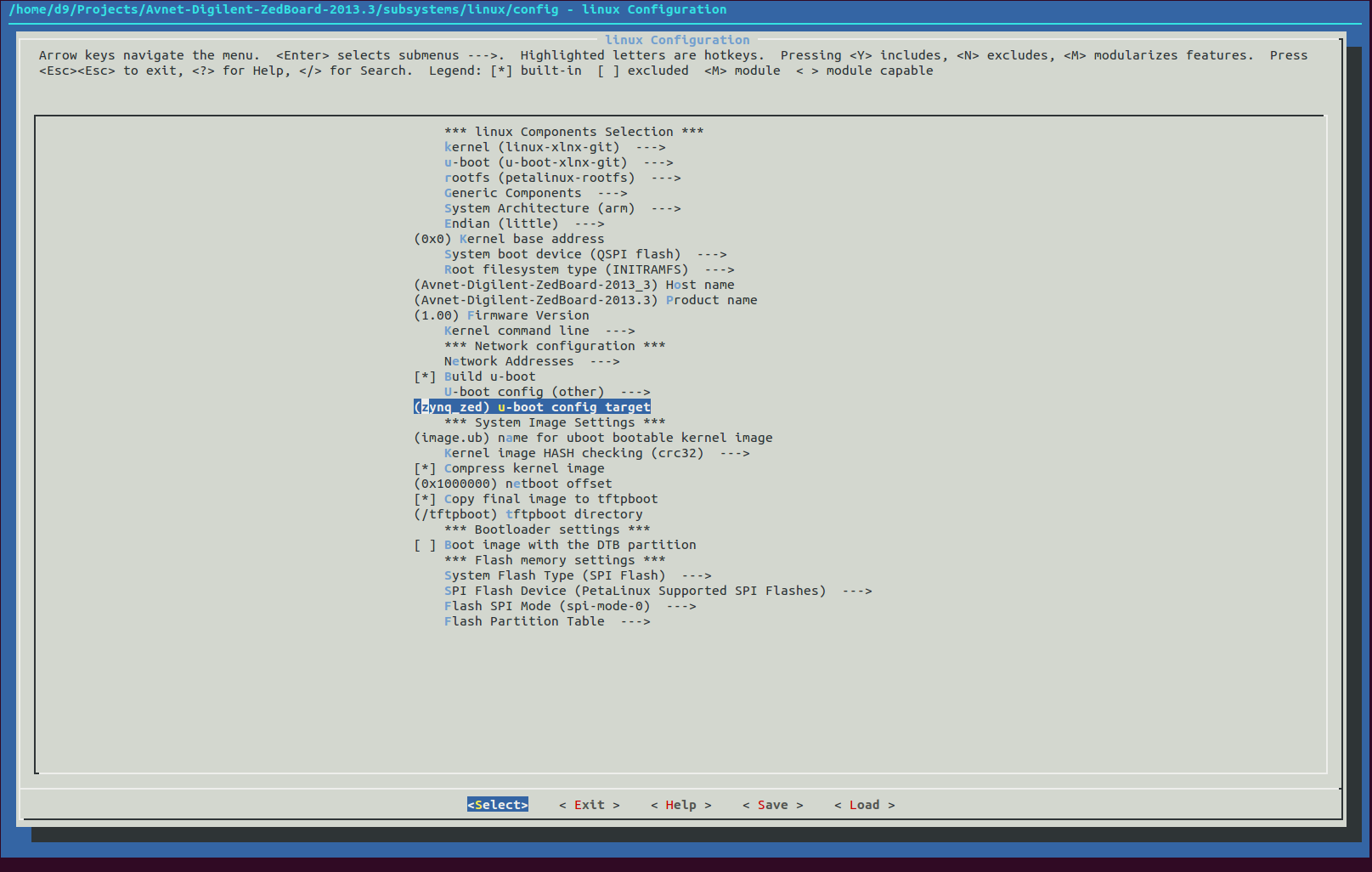
In a main menu select 'kernel' submenu and then switch from kernel 'xlnx-3.8' kernel to our new 'linux-xlnx-git'.
In a main menu select 'u-boot' submenu and then switch to 'u-boot-xlnx-git'.
In a main menu select 'u-boot config' and then switch to 'other'.
In a main menu select 'u-boot config target (NEW)' and type 'zynq_zed'.
Save configuration and exit from menus. You can read more about options for Xilinx version of U-boot at , unfortunately not much more.
I went thru Xilinx Wiki pages and all PetaLinux documentation for 13.10 version and found very little information about u-boot customization options. I also went thru U-boot configuration scripts for PetaLinux and U-boot sources and found no specific different between Zynq_Zed and Zynq_Zc70x targets. Where is no 'MicroZed' target and I'm not sure if Zed or Zc70x will work for it.
If somebody knows more about Xilinx patches and/or configuration for U-boot - please share information. I'm in particular interesting if I will need to change U-boot configuration to support my custom board, what and how.
INFO: The image provided is a zImage and no addition options were provided
INFO: Append dtb - /home/d9/Projects/Avnet-Digilent-ZedBoard-2013.3/pre-built/linux/images/system.dtb and other options to boot zImage
INFO: Configuring the FPGA...
INFO: FPGA configuration completed.
INFO: Downloading FSBL
INFO: FSBL download completed.
INFO: Launching XMD for file download and boot.
INFO: This may take a few minutes, depending on the size of your image.
Verify that now U-boot version is 2013.10 and Linux Kernel is 3.12.0
U-Boot 2013.10 (Feb 19 2014 - 15:47:16)
Linux Avnet-Digilent-ZedBoard-2013_3 3.12.0+ #2 SMP PREEMPT Wed Feb 19 15:49:58 EST 2014 armv7l GNU/Linux
Congratulations! We got latest Xilinx patched u-boot and kernel version running on our ZedBoard.
P.S. I tried to download and build vanilla Linux Kernel versions 3.12.11 and 3.13.3 from kernel.org - it builds and boots, but some hardware not working. So, we may need to apply some Xilinx Zynq related patches to vanilla kernel, but this is another topic.
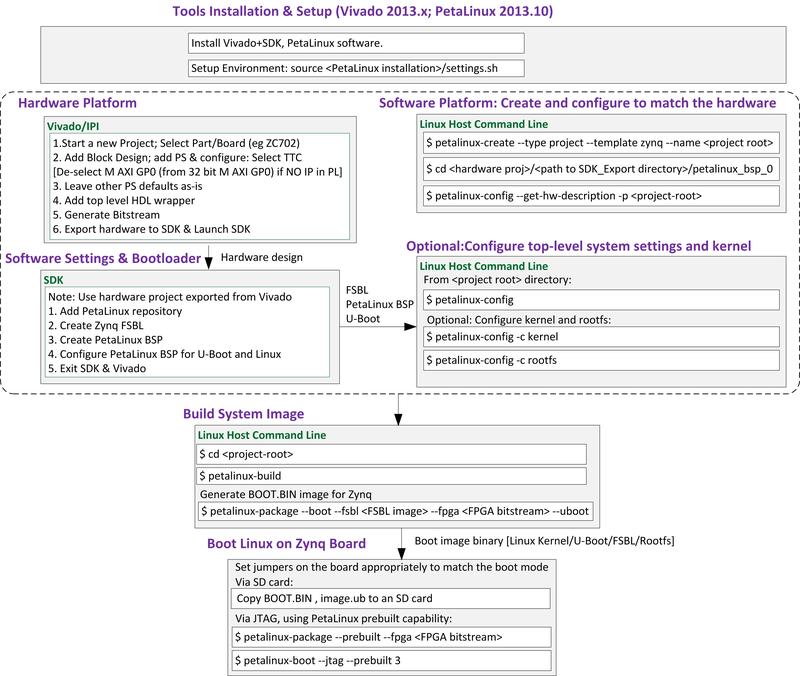
Just a picture from Xilinx.com describing new design flow for PetaLinux 13.10 with Vivado 13.x. Helped me alot to figure out changes from previous PetaLinux releases.
This is what I got in my home ~/Download directory
d9@ubuntu:~/Downloads$ ls -l
total 7990712
-rw-r--r-- 1 d9 d9 63148594 Feb 4 21:03 Avnet-Digilent-ZedBoard-v2013.10-final.bsp
-rw------- 1 d9 d9 5112946 Feb 8 14:24 digilent.adept.runtime_2.15.3-x86_64.tar.gz
-rw------- 1 d9 d9 33690 Feb 8 14:24 digilent.adept.utilities_2.1.1-x86_64.tar.gz
-rw------- 1 d9 d9 10809690 Feb 8 14:25 libCseDigilent_2.5.2-x86_64.tar.gz
-rwxr-xr-x 1 d9 d9 791339806 Feb 4 21:10 petalinux-v2013.10-final-installer.run
-rw-r--r-- 1 d9 d9 1773 Feb 4 18:25 Xilinx.lic
-rw-r--r-- 1 d9 d9 7312015360 Jan 17 18:46 Xilinx_Vivado_SDK_2013.4_1210_1.tar
4. We will need a serial communication program - I prefer gtkterm. So, lets install and try to communicate with ZedBoard. Open console (search for 'term'), in a console:
And we got first error message: Cannot open /dev/ttyS0: Permission denied. Lets figure out why:
d9@ubuntu:~$ ls -l /dev/ttyS0
crw-rw---- 1 root dialout 4, 64 Feb 4 19:12 /dev/ttyS0
d9@ubuntu:~$ groups
d9 adm cdrom sudo dip plugdev lpadmin sambashare
So, /dev/ttyS0 as well as all other serial port devices (including /dev/ttyACM0 which is ZedBoard USB-to-Serial port) belongs to 'root' and 'dialout' groups and our user are not in any of them. So, lets add us into dialout, apply changes, check and run gtkterm. Note: you may reboot to apply changes permanently.
d9@ubuntu:~$ sudo addgroup d9 dialout
sudo password for d9:
Adding user `d9' to group `dialout' ...
Adding user d9 to group dialout
Done.
d9@ubuntu:~$ su d9
Password:
d9@ubuntu:~$ groups
d9 adm dialout cdrom sudo dip plugdev lpadmin sambashare
d9@ubuntu:~$ gtkterm
Now, go to 'Configuration/Port', select ZedBoard serial port '/dev/ttyACM0', set'Baud Rate' to 115200 and save configuration for later use.
Lets reset ZedBoard and verify we can see its output. In my case ZedBoard booted from microSD card with examples from 'ZedBoard CTT' tutorial.
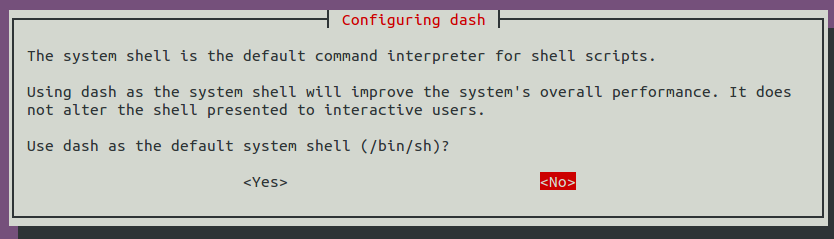
5. Now, lets install Xilinx Vivado 14.3. For Petalinix 13.10 I will use SystemEdition + SDK. Because of the silent error during Vivado installation it must be istalled after we switch Ubuntu's default shell(Dash) to Bash.
So, to switch shell run:
d9@ubuntu:~$ sudo dpkg-reconfigure dash
Select 'No' to use 'dash' as default system shell.
And verify we are using 'bash' now:
d9@ubuntu:~/Downloads$ ls -al /bin/sh
lrwxrwxrwx 1 root root 4 Feb 8 17:35 /bin/sh -> bash
Now, install Vivado into default directory 'opt/Xilinx':
d9@ubuntu:~$ cd Downloads/
d9@ubuntu:~/Downloads$ tar -xvf Xilinx_Vivado_SDK_2013.4_1210_1.tar
d9@ubuntu:~/Downloads$ sudo ./Xilinx_Vivado_SDK_2013.4_1210_1/xsetup
Install Vivado 13.4 in default folder '/opt/Xilinx', but don't forget to opt to 'Install Cable Drivers'. Everything went smoothly, except our JTAG driver.
Where is no options to select, so click Ok and we will deal with it later.
Next, installer will launch 'License managing tool' and all we need to do is to go to 'Locate Existing Licenses' and point to license file we got from Xilinx. Make sure Petalinux_NoSuport_Eval and Vivado_WebPack in a list and 'green'. Close the License Managment tool - Vivado now installed.
So, lets figure out what is going on with our JTAG. I will try to install Digilent JTAG drivers manually. First, install Adept Runtime and Adept utilities from package directories and use default/proposed locations:
d9@ubuntu:~/Downloads$ tar -xvf digilent.adept.runtime_2.15.3-x86_64.tar.gz
d9@ubuntu:~/Downloads$ cd digilent.adept.runtime_2.15.3-x86_64/
d9@ubuntu:~/Downloads/digilent.adept.runtime_2.15.3-x86_64$ sudo ./install.sh
d9@ubuntu:~/Downloads/digilent.adept.runtime_2.15.3-x86_64$ cd ..
d9@ubuntu:~/Downloads$ tar -xvf digilent.adept.utilities_2.1.1-x86_64.tar.gz
d9@ubuntu:~/Downloads$ cd digilent.adept.utilities_2.1.1-x86_64/
d9@ubuntu:~/Downloads/digilent.adept.utilities_2.1.1-x86_64$ sudo ./install.sh
Second, install 'libftdi2'. Also agree with default/proposed locations:
d9@ubuntu:~/Downloads$ cd ~/Downloads/digilent.adept.runtime_2.15.3-x86_64/ftdi.drivers_1.0.4-x86_64/
d9@ubuntu:~/Downloads/digilent.adept.runtime_2.15.3-x86_64/ftdi.drivers_1.0.4-x86_64$ sudo ./install.sh
FTDI Driver Installer
64-bit operating system detected
In which directory should libraries be installed? [/usr/local/lib64]
Checking to see if libftd2xx.so is already installed....
Existing installation of libftd2xx.so found. Checking to see if this version should be installed.
Version 1.0.4 is currently installed. Version libftd2xx.so.1.0.4 will not be installed.
Successfully updated dynamic loader cache
Successfully installed FTDI Driver
Next install Digilent plugin for Xilinx tools. Unpack plugin archive, create 'Digilent/libCseDigilent' directory in Xilinx SDK plugin folder and copy plugin files in it:
d9@ubuntu:~/Downloads/digilent.adept.utilities_2.1.1-x86_64$ cd ~/Downloads
d9@ubuntu:~/Downloads$ tar -xvf libCseDigilent_2.5.2-x86_64.tar.gz
d9@ubuntu:~/Downloads$ sudo mkdir /opt/Xilinx/SDK/2013.4/lib/lin64/plugins/Digilent
d9@ubuntu:~/Downloads$ sudo mkdir /opt/Xilinx/SDK/2013.4/lib/lin64/plugins/Digilent/libCseDigilent
d9@ubuntu:~/Downloads$ sudo cp libCseDigilent_2.5.2-x86_64/ISE14x/plugin/* /opt/Xilinx/SDK/2013.4/lib/lin64/plugins/Digilent/libCseDigilent/
Lets check JTAG with Digilent 'djtgcfg' util. To do so, connect JTAG-USB if it not connected yet and turn 'on' ZedBoard then type 'djtfcfg enum' if you see Zed device found along with it serial number - we are in good shape:
d9@ubuntu:~$ djtgcfg enum
Found 1 device(s)
Device: Zed
Product Name: Digilent Zed
User Name: Zed
Serial Number: XXXXXXXXXXXXX
6. Petalinux. Before we will start the installer we need to install missing libraries. Good thing is PetaLinux installer checks and inform us about missing staff. In case of 32bit Ubuntu 2013.10 we are missing only 'gawk'. But, for 64bit we need some 64 and some 32bit packages and libraries since PetaLinux and its installer depend on them. So, lets install them in this order:
With our license already installed (with Vivado) we can setup and check PetaLinux enviroment settings:
d9@ubuntu:~/Downloads$ source /opt/petalinux-v2013.10-final/settings.sh
PetaLinux environment set to '/opt/petalinux-v2013.10-final'
INFO: Checking free disk space
INFO: Checking installed tools
INFO: Checking installed development libraries
INFO: Checking network and other services
WARNING: No tftp server found - please refer to "PetaLinux SDK Installation Guide" for its impact and solution
d9@ubuntu:~/Downloads$ echo $PETALINUX
/opt/petalinux-v2013.10-final
7. So, let's fix 'tftp' problem. First, check what packages we are missing and install them:
d9@ubuntu:~/Downloads$ dpkg -l xinetd tftp tftpd
dpkg-query: no packages found matching xinetd
dpkg-query: no packages found matching tftp
dpkg-query: no packages found matching tftpd
d9@ubuntu:~/Downloads$ sudo apt-get install xinetd tftpd tftp
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following NEW packages will be installed:
tftp tftpd xinetd
0 upgraded, 3 newly installed, 0 to remove and 1 not upgraded
Second, create file called 'tftp' in '/etc/xinetd.d/' and fill it with:
service tftp
{
protocol = udp
port = 69
socket_type = dgram
wait = yes
user = nobody
server = /usr/sbin/in.tftpd
server_args = /tftpboot
disable = no
}
Thirtd, create directory for tftp files '/tftpboot', change permissions and restart services:
d9@ubuntu:~/Downloads$ sudo mkdir /tftpboot
d9@ubuntu:~/Downloads$ sudo chown d9:d9 /tftpboot
d9@ubuntu:~/Downloads$ sudo /etc/init.d/xinetd restart
* Stopping internet superserver xinetd [ OK ]
* Starting internet superserver xinetd [ OK ]
While in a home/download directory create some file for testing, connect locally to tftp and 'get' the file.
d9@ubuntu:~/Downloads$ echo "test1" > /tftpboot/testfile
d9@ubuntu:~/Downloads$ more /tftpboot/testfile
test1
d9@ubuntu:~/Downloads$ tftp 127.0.0.1
tftp> get testfile
Received 7 bytes in 0.0 seconds
tftp> quit
d9@ubuntu:~/Downloads$ more testfile
test1
d9@ubuntu:~/Downloads$ rm testfile
tftp seems to work now.
9. Next, let's install PetaLinux ZedBoard board support package(BSP):
d9@ubuntu:~$ cd ~
d9@ubuntu:~$ mkdir Projects
d9@ubuntu:~$ cd Projects/
d9@ubuntu:~/Projects$ source /opt/petalinux-v2013.10-final/settings.sh
d9@ubuntu:~/Projects$ echo $PETALINUX
/opt/petalinux-v2013.10-final
d9@ubuntu:~/Projects$ petalinux-create -t project -s ../Downloads/Avnet-Digilent-ZedBoard-v2013.10-final.bsp
INFO: Create project:
INFO: Projects:
INFO: * Avnet-Digilent-ZedBoard-14.7
INFO: * Avnet-Digilent-ZedBoard-2013.3
INFO: has been successfully installed to /home/d9/Projects/
INFO: New project successfully created in /home/d9/Projects/
10. Looks like we are successfully installed BSP. Now lets test prebuilt Petalinux v2013.10 image using QEMU:
d9@ubuntu:~/Projects$ cd Avnet-Digilent-ZedBoard-2013.3/
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-boot --qemu --prebuilt 3
Use 'root'/'root' for username and password and then 'uname -a' to see what we got. To quit from QEMU monitor hit 'Ctlrl + A', then X.
Avnet-Digilent-ZedBoard-2013_3 login: root
Password:
login[780]: root login on `ttyPS0'
root@Avnet-Digilent-ZedBoard-2013_3:~# uname -a
Linux Avnet-Digilent-ZedBoard-2013_3 3.8.11 #2 SMP PREEMPT Thu Nov 21 18:30:11 EST 2013 armv7l GNU/Linux
root@Avnet-Digilent-ZedBoard-2013_3:~# QEMU: Terminated
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$
11. Now lets test prebuilt image on ZedBoard using JTAG. Source Vivado SDK settings.
Also, set MIO3, MIO4 and MIO5 jumpers on ZedBoard to 'ground position for JTAG boot. Then power ZedBoard on, run 'gtkterm' program and then:
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-boot --jtag --prebuilt 3
INFO: The image provided is a zImage and no addition options were provided
INFO: Append dtb - /home/d9/Projects/Avnet-Digilent-ZedBoard-2013.3/pre-built/linux/images/system.dtb and other options to boot zImage
INFO: Configuring the FPGA...
INFO: FPGA configuration completed.
INFO: Downloading FSBL
INFO: FSBL download completed.
INFO: Launching XMD for file download and boot.
INFO: This may take a few minutes, depending on the size of your image.
I found that JTAG boot works on just powered board and failed to download FSBL if I just reset the board. In order to reset PS and PL all together you have to short JP13 on ZedBoard (Short connects JTAG PROG-RST to PS Reset).
12. Now, lets rebuilt PetaLinux kernel and boot updated kernel on ZedBoard using JTAG. So, while in a ZedBoard project directory:
Reset(with JP13 shorted) or 'power on' ZedBoard and then:
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-boot --jtag --prebuilt 2
INFO: Configuring the FPGA...
INFO: FPGA configuration completed.
INFO: Downloading FSBL
INFO: FSBL download completed.
INFO: Launching XMD for file download and boot.
INFO: This may take a few minutes, depending on the size of your image.
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-boot --jtag --kernel
INFO: The image provided is a zImage and no addition options were provided
INFO: Append dtb - /home/d9/Projects/Avnet-Digilent-ZedBoard-2013.3/images/linux/system.dtb and other options to boot zImage
INFO: Cannot detect the ARCH from the image.
INFO: We will get the ARCH from the system config.
INFO: Launching XMD for file download and boot.
INFO: This may take a few minutes, depending on the size of your image.
Login as 'root'/'root' again and check build date - it should be current. Congratulations! Now we got working PetaLinux SDK on latest Ubuntu 13.10.