PetaLinux 13.10 coming with U-boot vesrion 2013.07 and Linux Kernel 3.8.1. If for some reason you need to change U-boot and/or Linux kernel with newer one - u can do it manually(configure, compile and include to BOOT.BIN image) or using PetaLinux tools to automate it. This post will be about later.
I will do it on virtual machine (VMWare Workstation 10) running Ubuntu 13.10 64 bit version with PetaLinux 13.10 already installed. I will also use fresh installation of prebuilt Avnet-Digilent BSP for ZedBoard, but this recipe works for my custom "hardware design" for ZedBoard too.
- So, since I'm using 64 bit Ubuntu, I'm missing quite a few packages, especially 32bit versions. Below the list, but some package uninstalled my 64 version of GCC, so I re-install it as a last step.
sudo apt-get install gawk
sudo apt-get install build-essential
sudo apt-get install automake
sudo apt-get install libtool
sudo apt-get install lib32ncurses5
sudo apt-get install lib32ncurses5-dev
sudo apt-get install lib32ncursesw5
sudo apt-get install ncurses-dev:i386
sudo apt-get install libstdc++6:i386
sudo apt-get install libselinux1:i386
sudo apt-get install gcc
- Also, gmake package for Ubuntu not exist, but some Xilinx tools relay on it, so lets gmake symlink to make:
sudo ln -s /usr/bin/make /usr/bin/gmake
- We also have to source PetaLinux settings, but because I'm always forget to do it - I will change my .bashrc so it will be done automatically, each time I log in. SO, in home directory, add next instructions to the end of the ~/.bashrc file.
export CROSS_COMPILE=arm-xilinx-linux-gnueabi-
source /opt/petalinux-v2013.10-final/settings.sh
source /opt/Xilinx/Vivado/2013.4/settings64.sh
- Next, download 'petalinux-v2013.10-final-installer.run' from Xilinx website and put in ~/Downloads directory.
- Now, let's create 'Projects' forlder for our PetaLinux projects and install Avnet-Digilent BSP project into it. It will create 2 projects for us: Vivado 13.3 and ISE-14.7. I will use Vivado one and we can delete 14.7.
d9@ubuntu:~$ mkdir Projects
d9@ubuntu:~$ cd Projects
d9@ubuntu:~/Projects$ petalinux-create -t project -s ../Downloads/Avnet-Digilent-ZedBoard-v2013.10-final.bsp
INFO: Create project:
INFO: Projects:
INFO: * Avnet-Digilent-ZedBoard-14.7
INFO: * Avnet-Digilent-ZedBoard-2013.3
INFO: has been successfully installed to /home/d9/Projects/
INFO: New project successfully created in /home/d9/Projects/
d9@ubuntu:~/Projects$ cd Avnet-Digilent-ZedBoard-2013.3/
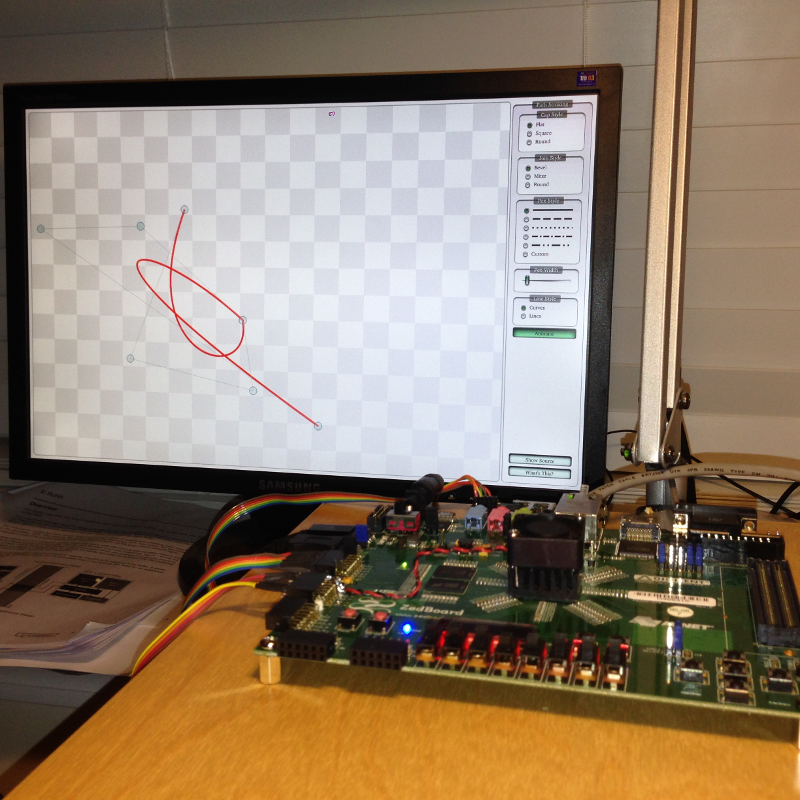
- Let's test prebuilt packages using JTAG on our ZedBoard. Set MIO3, MIO4 and MIO5 jumpers on ZedBoard to JTAG boot(all to GND), turn board on, run 'gtkterm' (use ZedBoard USB-to-Serial port) and boot using petalinux-boot. Below output I got on my ZedBoard:
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-boot --jtag --prebuilt 3
U-Boot 2013.07 (Nov 21 2013 - 18:27:09)
Memory: ECC disabled
DRAM: 512 MiB
MMC: zynq_sdhci: 0
SF: Detected S25FL256S_64K with page size 64 KiB, total 32 MiB
*** Warning - bad CRC, using default environment
In: serial
Out: serial
Err: serial
Net: Gem.e000b000
U-BOOT for Avnet-Digilent-ZedBoard-2013.3
Gem.e000b000 Waiting for PHY auto negotiation to complete...Booting Linux on physical CPU 0x0
Linux version 3.8.11 (xbrbbot@xbrlab02) (gcc version 4.7.3 (Sourcery CodeBench Lite 2013.05-40) )
#2 SMP PREEMPT Thu Nov 21 18:30:11 EST 2013
CPU: ARMv7 Processor [413fc090] revision 0 (ARMv7), cr=18c5387d
CPU: PIPT / VIPT nonaliasing data cache, VIPT aliasing instruction cache
Machine: Xilinx Zynq Platform, model: .
Memory policy: ECC disabled, Data cache writealloc
PERCPU: Embedded 7 pages/cpu @c1004000 s6592 r8192 d13888 u32768
Built 1 zonelists in Zone order, mobility grouping on. Total pages: 130048
Kernel command line: console=ttyPS0,115200
PID hash table entries: 2048 (order: 1, 8192 bytes)
Dentry cache hash table entries: 65536 (order: 6, 262144 bytes)
Inode-cache hash table entries: 32768 (order: 5, 131072 bytes)
__ex_table already sorted, skipping sort
Memory: 512MB = 512MB total
Memory: 507392k/507392k available, 16896k reserved, 0K highmem
Virtual kernel memory layout:
vector : 0xffff0000 - 0xffff1000 ( 4 kB)
fixmap : 0xfff00000 - 0xfffe0000 ( 896 kB)
vmalloc : 0xe0800000 - 0xff000000 ( 488 MB)
lowmem : 0xc0000000 - 0xe0000000 ( 512 MB)
pkmap : 0xbfe00000 - 0xc0000000 ( 2 MB)
modules : 0xbf000000 - 0xbfe00000 ( 14 MB)
.text : 0xc0008000 - 0xc04eafd4 (5004 kB)
.init : 0xc04eb000 - 0xc0bb39c0 (6947 kB)
.data : 0xc0bb4000 - 0xc0be1900 ( 183 kB)
.bss : 0xc0be1900 - 0xc0bfcff0 ( 110 kB)
Preemptible hierarchical RCU implementation.
NR_IRQS:16 nr_irqs:16 16
xslcr mapped to e0802000
Zynq clock init
sched_clock: 16 bits at 54kHz, resolution 18432ns, wraps every 1207ms
ps7-ttc #0 at e0804000, irq=43
Console: colour dummy device 80x30
Calibrating delay loop... 1332.01 BogoMIPS (lpj=6660096)
pid_max: default: 32768 minimum: 301
Mount-cache hash table entries: 512
CPU: Testing write buffer coherency: ok
Setting up static identity map for 0x359180 - 0x3591b4
L310 cache controller enabled
l2x0: 8 ways, CACHE_ID 0x000000c0, AUX_CTRL 0x72360000, Cache size: 524288 B
CPU1: Booted secondary processor
Brought up 2 CPUs
SMP: Total of 2 processors activated (2664.03 BogoMIPS).
devtmpfs: initialized
NET: Registered protocol family 16
DMA: preallocated 256 KiB pool for atomic coherent allocations
xgpiops e000a000.ps7-gpio: gpio at 0xe000a000 mapped to 0xe084e000
bio: create slab <bio-0> at 0
GPIO IRQ not connected
XGpio: /amba@0/gpio@41200000: registered, base is 251
GPIO IRQ not connected
XGpio: /amba@0/gpio@41210000: registered, base is 243
GPIO IRQ not connected
XGpio: /amba@0/gpio@41220000: registered, base is 235
SCSI subsystem initialized
usbcore: registered new interface driver usbfs
usbcore: registered new interface driver hub
usbcore: registered new device driver usb
Switching to clocksource xttcps_clocksource
NET: Registered protocol family 2
TCP established hash table entries: 4096 (order: 3, 32768 bytes)
TCP bind hash table entries: 4096 (order: 3, 32768 bytes)
TCP: Hash tables configured (established 4096 bind 4096)
TCP: reno registered
UDP hash table entries: 256 (order: 1, 8192 bytes)
UDP-Lite hash table entries: 256 (order: 1, 8192 bytes)
NET: Registered protocol family 1
RPC: Registered named UNIX socket transport module.
RPC: Registered udp transport module.
RPC: Registered tcp transport module.
RPC: Registered tcp NFSv4.1 backchannel transport module.
jffs2: version 2.2. (NAND) (SUMMARY) © 2001-2006 Red Hat, Inc.
msgmni has been set to 991
Block layer SCSI generic (bsg) driver version 0.4 loaded (major 253)
io scheduler noop registered
io scheduler deadline registered
io scheduler cfq registered (default)
e0001000.serial: ttyPS0 at MMIO 0xe0001000 (irq = 82) is a xuartps
console [ttyPS0] enabled
xdevcfg f8007000.ps7-dev-cfg: ioremap f8007000 to e0874000 with size 100
st: Version 20101219, fixed bufsize 32768, s/g segs 256
osst :I: Tape driver with OnStream support version 0.99.4
osst :I: $Id: osst.c,v 1.73 2005/01/01 21:13:34 wriede Exp $
SCSI Media Changer driver v0.25
xqspips e000d000.ps7-qspi: master is unqueued, this is deprecated
m25p80 spi32766.0: fallback to 3-byte address mode
m25p80 spi32766.0: maximum accessible size is 16MB
m25p80 spi32766.0: s25fl256s1 (32768 Kbytes)
4 ofpart partitions found on MTD device spi32766.0
Creating 4 MTD partitions on "spi32766.0":
0x000000000000-0x000000500000 : "boot"
0x000000500000-0x000000520000 : "bootenv"
0x000000520000-0x000000fa0000 : "image"
0x000000fa0000-0x000002000000 : "spare"
xqspips e000d000.ps7-qspi: at 0xE000D000 mapped to 0xE0876000, irq=51
libphy: XEMACPS mii bus: probed
xemacps e000b000.ps7-ethernet: pdev->id -1, baseaddr 0xe000b000, irq 54
ehci_hcd: USB 2.0 'Enhanced' Host Controller (EHCI) Driver
ULPI transceiver vendor/product ID 0x0451/0x1507
Found TI TUSB1210 ULPI transceiver.
ULPI integrity check: passed.
xusbps-dr xusbps-udc.0: Controller already in use
xusbps-dr: probe of xusbps-udc.0 failed with error -16
Initializing USB Mass Storage driver...
usbcore: registered new interface driver usb-storage
USB Mass Storage support registered.
i2c /dev entries driver
xadcps f8007100.ps7-xadc: enabled: yes reference: external
sdhci: Secure Digital Host Controller Interface driver
sdhci: Copyright(c) Pierre Ossman
sdhci-pltfm: SDHCI platform and OF driver helper
mmc0: SDHCI controller on e0100000.ps7-sdio [e0100000.ps7-sdio] using ADMA
usbcore: registered new interface driver usbhid
usbhid: USB HID core driver
TCP: cubic registered
NET: Registered protocol family 10
sit: IPv6 over IPv4 tunneling driver
NET: Registered protocol family 17
NET: Registered protocol family 40
VFP support v0.3: implementor 41 architecture 3 part 30 variant 9 rev 4
Registering SWP/SWPB emulation handler
Freeing init memory: 6944K
INIT: version 2.88 booting
mmc0: new high speed SDHC card at address aaaa
mmcblk0: mmc0:aaaa SU32G 29.7 GiB
mmcblk0: p1
Starting Bootlog daemon: bootlogd.
Creating /dev/flash/* device nodes
Configuring network interfaces... udhcpc (v1.20.2) started
Sending discover...
xemacps e000b000.ps7-ethernet: Set clk to 24999999 Hz
xemacps e000b000.ps7-ethernet: link up (100/HALF)
IPv6: ADDRCONF(NETDEV_CHANGE): eth0: link becomes ready
Sending discover...
Sending select for 172.19.1.113...
Lease of 172.19.1.113 obtained, lease time 28800
/etc/udhcpc.d/50default: Adding DNS 172.19.2.60
/etc/udhcpc.d/50default: Adding DNS 172.19.2.56
done.
starting Busybox inet Daemon: inetd... done.
Starting uWeb server:
INIT: Entering runlevel: 5
Stopping Bootlog daemon: bootlogd.
_____ _ _ _
| ___ \ | | | | (_)
| |_/ / ___ | |_ __ _ | | _ _ __ _ _ __ __
| __/ / _ \| __| / _` || | | || '_ \ | | | |\ \/ /
| | | __/| |_ | (_| || |____| || | | || |_| | > <
\_| \___| \__| \__,_|\_____/|_||_| |_| \__,_|/_/\_\
PetaLinux v2013.10 (Yocto 1.4) Avnet-Digilent-ZedBoard-2013_3 ttyPS0
Avnet-Digilent-ZedBoard-2013_3 login:
- As you can see very first in a log is U-boot version and build timestamp: U-Boot 2013.07 (Nov 21 2013 - 18:27:09).
Loging as 'root'/'root' and check what version of kernel we got. It's 3.8.11 and it built on Thu Nov 21 18:30:11 EST 2013.
root@Avnet-Digilent-ZedBoard-2013_3:~# uname -a
Linux Avnet-Digilent-ZedBoard-2013_3 3.8.11 #2 SMP PREEMPT Thu Nov 21 18:30:11 EST 2013 armv7l GNU/Linux
- Now, let's verify that we can reconfigure and rebuild existing kernel, uboot and rootfs. Run petalinux-config for each one, but don't change any settings yet. Just go thru menus if you like and exit. If you got any errors - most likely your installation missing some packages.
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-config
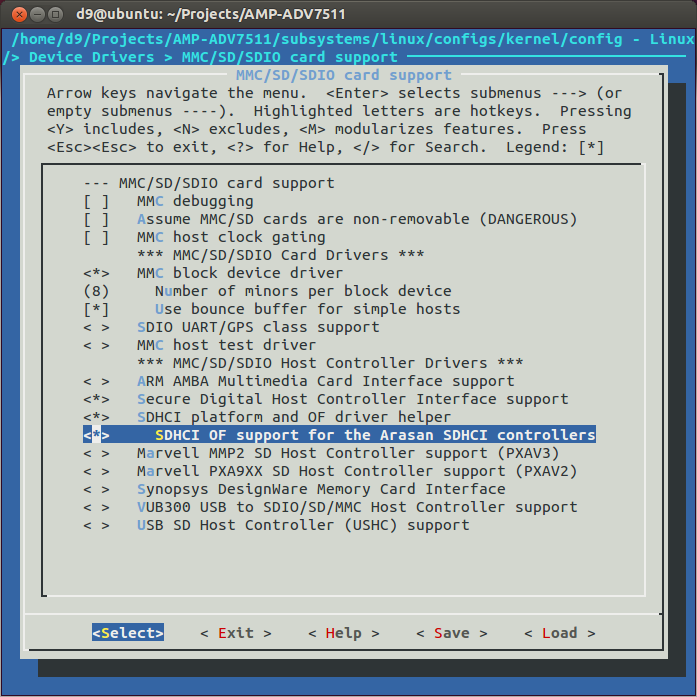
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-config -c kernel
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-config -c rootfs
- Clean whatever we may have from previus builds and re-build it.
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-build -x mrproper
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-build
- This is the build log I got.
INFO: Checking component...
INFO: Generating make files and build linux
INFO: Generating make files for the subcomponents of linux
INFO: Building linux
[INFO ] pre-build linux/rootfs/fwupgrade
[INFO ] pre-build linux/rootfs/peekpoke
[INFO ] pre-build linux/rootfs/uWeb
[INFO ] build system.dtb
[INFO ] build linux/kernel
[INFO ] update linux/u-boot source
[INFO ] generate linux/u-boot configuration files
[INFO ] build linux/u-boot
[INFO ] Setting up stage config
[INFO ] Setting up rootfs config
[INFO ] Updating for armv7a-vfp-neon
[INFO ] Updating package manager
[INFO ] Expanding stagefs
[INFO ] build linux/rootfs/fwupgrade
[INFO ] build linux/rootfs/peekpoke
[INFO ] build linux/rootfs/uWeb
[INFO ] build kernel in-tree modules
[INFO ] modules linux/kernel
[INFO ] post-build linux/rootfs/fwupgrade
[INFO ] post-build linux/rootfs/peekpoke
[INFO ] post-build linux/rootfs/uWeb
[INFO ] pre-install linux/rootfs/fwupgrade
[INFO ] pre-install linux/rootfs/peekpoke
[INFO ] pre-install linux/rootfs/uWeb
[INFO ] install linux/kernel
[INFO ] install linux/u-boot
[INFO ] Setting up rootfs config
[INFO ] Setting up stage config
[INFO ] Updating for armv7a-vfp-neon
[INFO ] Updating package manager
[INFO ] Expanding rootfs
[INFO ] install sys_init
[INFO ] install linux/rootfs/fwupgrade
[INFO ] install linux/rootfs/peekpoke
[INFO ] install linux/rootfs/uWeb
[INFO ] install kernel in-tree modules
[INFO ] modules_install linux/kernel
[INFO ] post-install linux/rootfs/fwupgrade
[INFO ] post-install linux/rootfs/peekpoke
[INFO ] post-install linux/rootfs/uWeb
[INFO ] package rootfs.cpio to /home/d9/Projects/Avnet-Digilent-ZedBoard-2013.3/images/linux
[INFO ] Update and install vmlinux image
[INFO ] vmlinux linux/kernel
[INFO ] install linux/kernel
[INFO ] package zImage
[INFO ] zImage linux/kernel
[INFO ] install linux/kernel
[INFO ] package FIT image
- Now, we need to generate BOOT.BIN which includes our hardware implementation bitstream, FSBL and U-boot. Bitstream and FSBL executable are the same, so we will point them to petalinux tool and it will use just built u-boot exec. By default tool will put BOOT.BIN in current directory, but we need it to be in images directory. I will also force to replace file if it exists.
petalinux-package --boot --fsbl pre-built/linux/images/zynq_fsbl.elf --fpga pre-built/linux/implementation/download.bit --uboot --force -o images/linux/BOOT.BIN
INFO: Generating zynq binary package BOOT.BIN...
INFO: Binary is ready.
- Replace, so called, prebuilt configuration for our PetaLinux project
petalinux-package --prebuilt --fpga pre-built/linux/implementation/download.bit --force
INFO: Pre-built directory is updated.
- Now we are ready to boot our rebuilt images using JTAG. So, reset ZedBoard (with JP13 shorted) or repower and run. Verify that we have same version of U-boot (2013.07) and Kernel 3.8.11, but build date is new.
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-boot --jtag --prebuilt 3
INFO: The image provided is a zImage and no addition options were provided
INFO: Append dtb - /home/d9/Projects/Avnet-Digilent-ZedBoard-2013.3/pre-built/linux/images/system.dtb and other options to boot zImage
INFO: Configuring the FPGA...
INFO: FPGA configuration completed.
INFO: Downloading FSBL
INFO: FSBL download completed.
INFO: Launching XMD for file download and boot.
INFO: This may take a few minutes, depending on the size of your image.
U-Boot 2013.07 (Feb 19 2014 - 14:43:34)
Linux Avnet-Digilent-ZedBoard-2013_3 3.8.11 #2 SMP PREEMPT Wed Feb 19 14:45:59 EST 2014 armv7l GNU/Linux
- Now, lets download new versions of U-boot and Linux kernel for Xilinx Git repository. More about Xilinx repo you can read on
sudo git clone git://github.com/Xilinx/linux-xlnx.git /opt/linux-xlnx-git
Cloning into '/opt/linux-xlnx-git'...
remote: Reusing existing pack: 3464199, done.
remote: Counting objects: 102, done.
remote: Compressing objects: 100% (102/102), done.
remote: Total 3464301 (delta 55), reused 0 (delta 0)
Receiving objects: 100% (3464301/3464301), 827.49 MiB | 5.99 MiB/s, done.
Resolving deltas: 100% (2906448/2906448), done.
Checking connectivity... done
Checking out files: 100% (44825/44825), done.
sudo git clone git://github.com/Xilinx/u-boot-xlnx.git /opt/u-boot-xlnx-git
Cloning into '/opt/u-boot-xlnx-git'...
remote: Reusing existing pack: 252804, done.
remote: Total 252804 (delta 0), reused 0 (delta 0)
Receiving objects: 100% (252804/252804), 69.40 MiB | 6.19 MiB/s, done.
Resolving deltas: 100% (201743/201743), done.
Checking connectivity... done
- Let's see what we got.
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ cd /opt/linux-xlnx-git/
d9@ubuntu:/opt/linux-xlnx-git$ git describe
xilinx-v2013.4
VERSION = 3
PATCHLEVEL = 12
SUBLEVEL = 0
EXTRAVERSION =
NAME = One Giant Leap for Frogkind
d9@ubuntu:/opt/linux-xlnx-git$ cd /opt/u-boot-xlnx-git/
d9@ubuntu:/opt/u-boot-xlnx-git$ git describe
xilinx-v2013.4
d9@ubuntu:/opt/u-boot-xlnx-git$ more Makefile
#
# (C) Copyright 2000-2013
# Wolfgang Denk, DENX Software Engineering, wd@denx.de.
#
# SPDX-License-Identifier: GPL-2.0+
#
VERSION = 2013
PATCHLEVEL = 10
SUBLEVEL =
EXTRAVERSION =
- So, for what its worth, for Kernel we got Git tag version 2013.4 and Makefile saying its 3.12.0. And for U-boot Git tag is 2013.4 and Makefile 2013.10.
Now we can copy Linux Kernel and U-Boot sources into our PetaLinux projects, but first we have to create some directories
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ mkdir components
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ mkdir components/linux-kernel
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ mkdir components/u-boot
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ cp -r /opt/linux-xlnx-git components/linux-kernel/
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ cp -r /opt/u-boot-xlnx-git components/u-boot/
- Configure PetaLinux project to include new kernel and u-boot sources. Run petalinux-config.
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-config
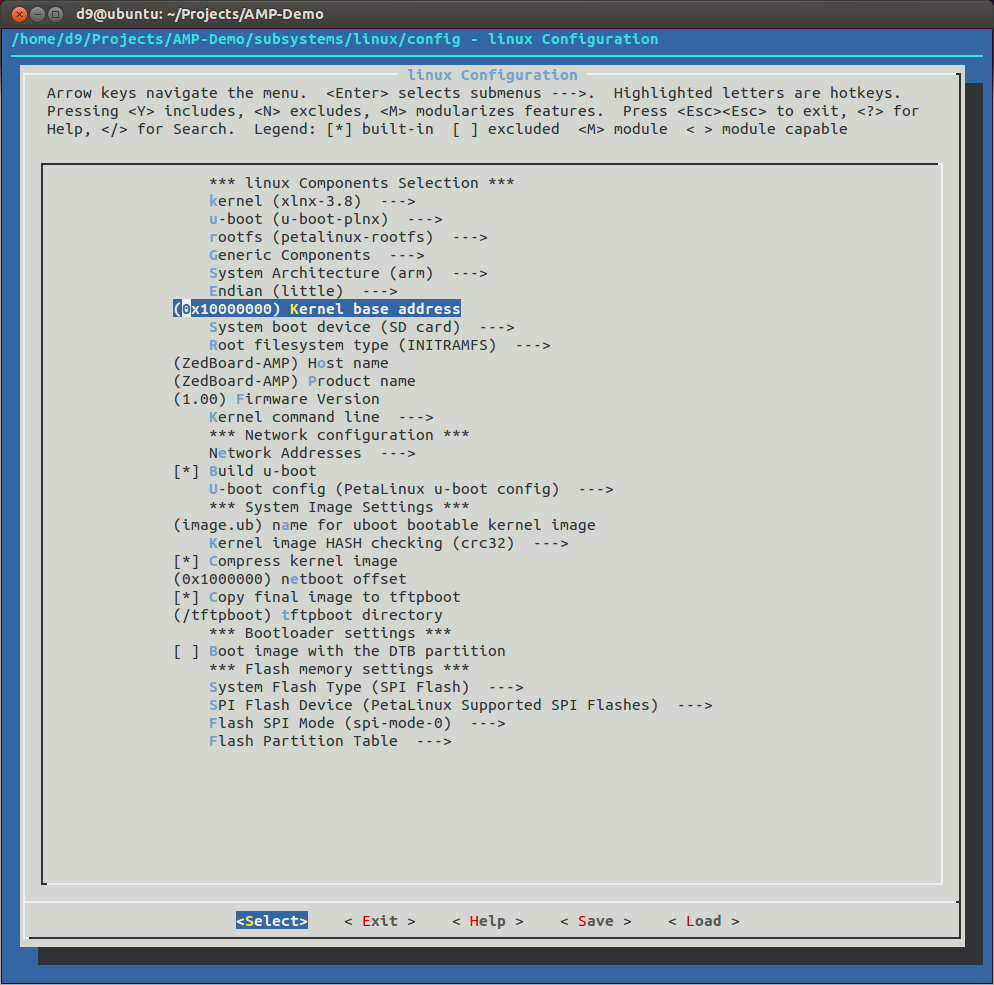
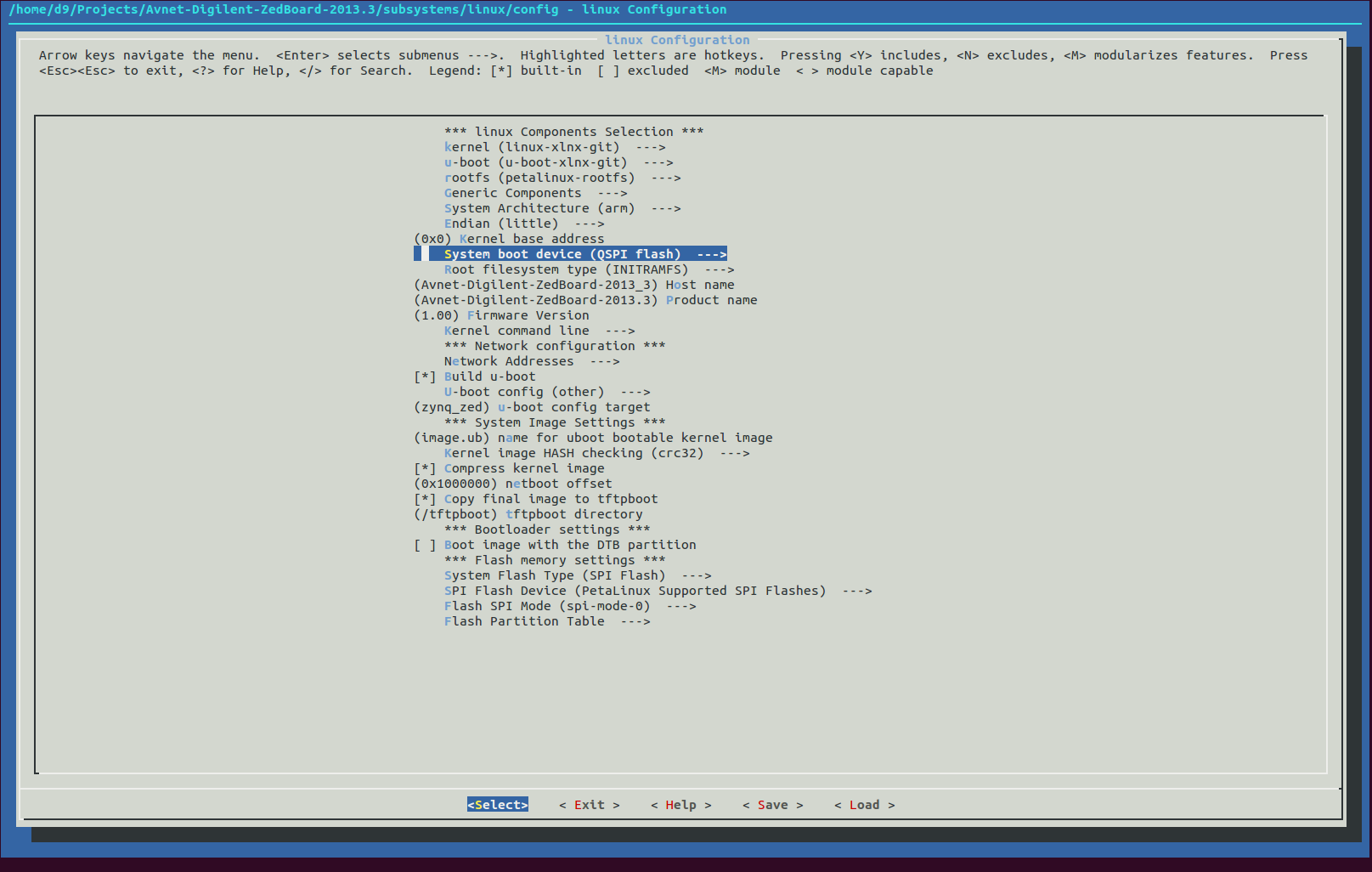
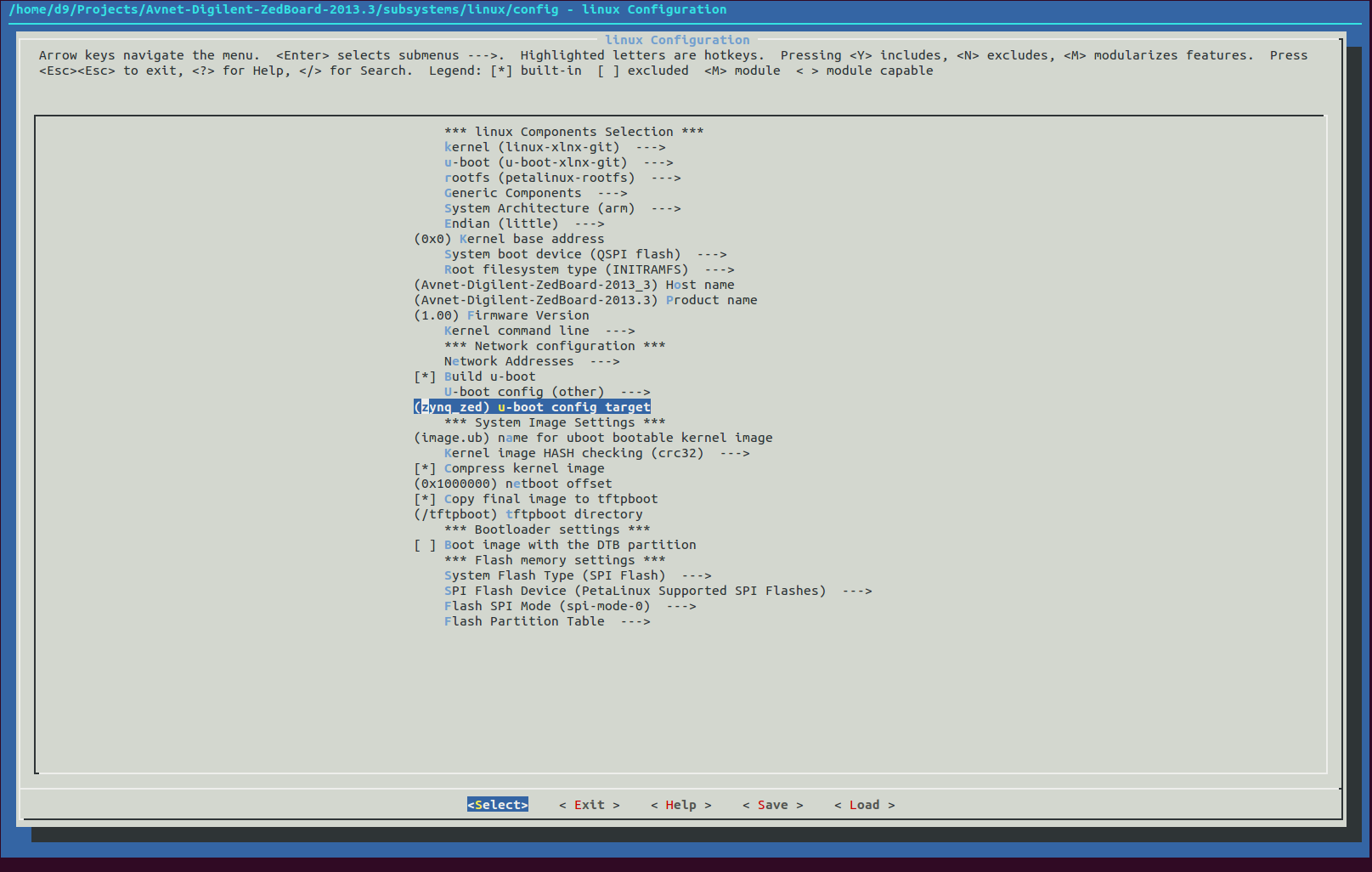
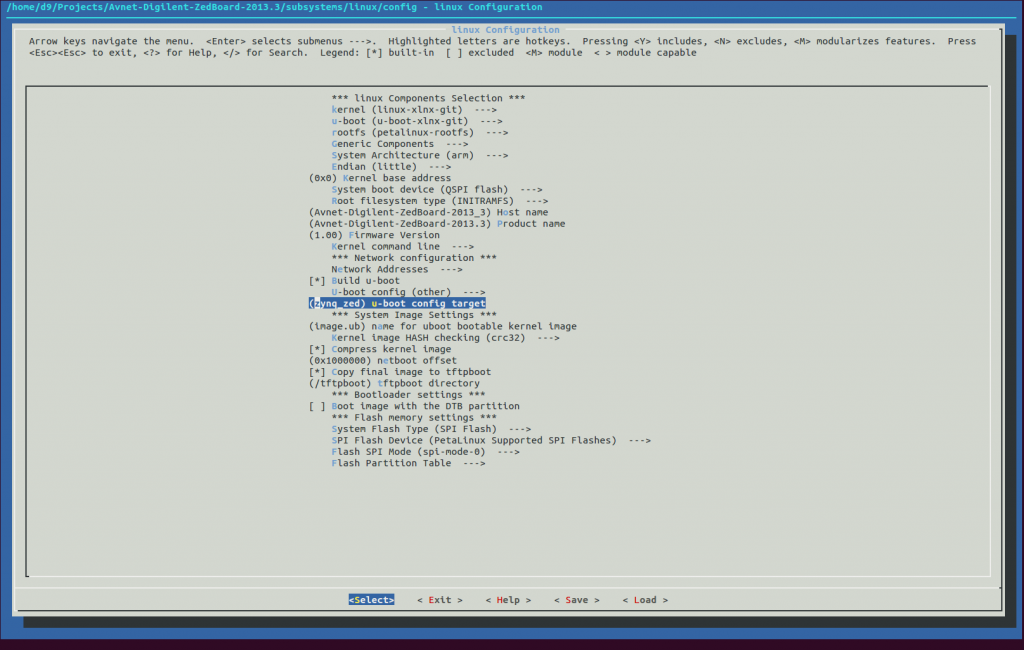
- In a main menu select 'kernel' submenu and then switch from kernel 'xlnx-3.8' kernel to our new 'linux-xlnx-git'.
- In a main menu select 'u-boot' submenu and then switch to 'u-boot-xlnx-git'.
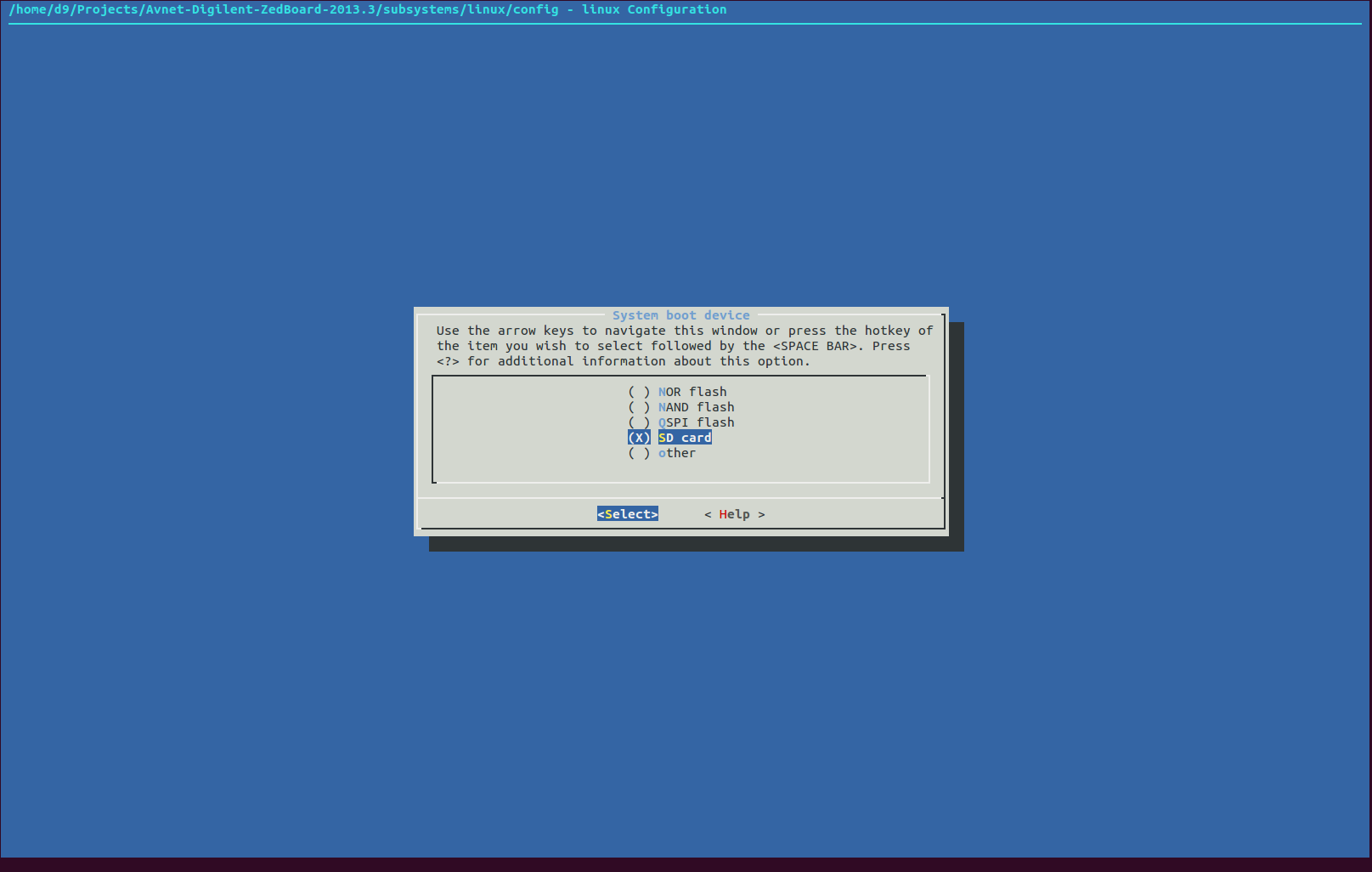
- In a main menu select 'u-boot config' and then switch to 'other'.
- In a main menu select 'u-boot config target (NEW)' and type 'zynq_zed'.
- Save configuration and exit from menus. You can read more about options for Xilinx version of U-boot at , unfortunately not much more.
I went thru Xilinx Wiki pages and all PetaLinux documentation for 13.10 version and found very little information about u-boot customization options. I also went thru U-boot configuration scripts for PetaLinux and U-boot sources and found no specific different between Zynq_Zed and Zynq_Zc70x targets. Where is no 'MicroZed' target and I'm not sure if Zed or Zc70x will work for it.
If somebody knows more about Xilinx patches and/or configuration for U-boot - please share information. I'm in particular interesting if I will need to change U-boot configuration to support my custom board, what and how.
- Anyway. Now we can rebuild whole thing.
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-build -x mrproper
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-build
INFO: Checking component...
INFO: Generating make files and build linux
INFO: Generating make files for the subcomponents of linux
INFO: Building linux
[INFO ] pre-build linux/rootfs/fwupgrade
[INFO ] pre-build linux/rootfs/peekpoke
[INFO ] pre-build linux/rootfs/uWeb
[INFO ] build system.dtb
[INFO ] build linux/kernel
[INFO ] update linux/u-boot source
[INFO ] generate linux/u-boot configuration files
[INFO ] build linux/u-boot
[INFO ] Setting up stage config
[INFO ] Setting up rootfs config
[INFO ] Updating for armv7a-vfp-neon
[INFO ] Updating package manager
[INFO ] Expanding stagefs
[INFO ] build linux/rootfs/fwupgrade
[INFO ] build linux/rootfs/peekpoke
[INFO ] build linux/rootfs/uWeb
[INFO ] build kernel in-tree modules
[INFO ] modules linux/kernel
[INFO ] post-build linux/rootfs/fwupgrade
[INFO ] post-build linux/rootfs/peekpoke
[INFO ] post-build linux/rootfs/uWeb
[INFO ] pre-install linux/rootfs/fwupgrade
[INFO ] pre-install linux/rootfs/peekpoke
[INFO ] pre-install linux/rootfs/uWeb
[INFO ] install linux/kernel
[INFO ] install linux/u-boot
[INFO ] Setting up rootfs config
[INFO ] Setting up stage config
[INFO ] Updating for armv7a-vfp-neon
[INFO ] Updating package manager
[INFO ] Expanding rootfs
[INFO ] install sys_init
[INFO ] install linux/rootfs/fwupgrade
[INFO ] install linux/rootfs/peekpoke
[INFO ] install linux/rootfs/uWeb
[INFO ] install kernel in-tree modules
[INFO ] modules_install linux/kernel
[INFO ] post-install linux/rootfs/fwupgrade
[INFO ] post-install linux/rootfs/peekpoke
[INFO ] post-install linux/rootfs/uWeb
[INFO ] package rootfs.cpio to /home/d9/Projects/Avnet-Digilent-ZedBoard-2013.3/images/linux
[INFO ] Update and install vmlinux image
[INFO ] vmlinux linux/kernel
[INFO ] install linux/kernel
[INFO ] package zImage
[INFO ] zImage linux/kernel
[INFO ] install linux/kernel
[INFO ] package FIT image
- Build BOOT.BIN and refresh Pre-built package using same commands:
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-package --boot --fsbl pre-built/linux/images/zynq_fsbl.elf --fpga pre-built/linux/implementation/download.bit --uboot --force -o images/linux/BOOT.BIN
INFO: Generating zynq binary package BOOT.BIN...
INFO: Binary is ready.
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-package --prebuilt --fpga pre-built/linux/implementation/download.bit --forceINFO: Pre-built directory is updated.
- Reset board and boot using JTAG:
d9@ubuntu:~/Projects/Avnet-Digilent-ZedBoard-2013.3$ petalinux-boot --jtag --prebuilt 3
INFO: The image provided is a zImage and no addition options were provided
INFO: Append dtb - /home/d9/Projects/Avnet-Digilent-ZedBoard-2013.3/pre-built/linux/images/system.dtb and other options to boot zImage
INFO: Configuring the FPGA...
INFO: FPGA configuration completed.
INFO: Downloading FSBL
INFO: FSBL download completed.
INFO: Launching XMD for file download and boot.
INFO: This may take a few minutes, depending on the size of your image.
- Verify that now U-boot version is 2013.10 and Linux Kernel is 3.12.0
U-Boot 2013.10 (Feb 19 2014 - 15:47:16)
Linux Avnet-Digilent-ZedBoard-2013_3 3.12.0+ #2 SMP PREEMPT Wed Feb 19 15:49:58 EST 2014 armv7l GNU/Linux
Congratulations! We got latest Xilinx patched u-boot and kernel version running on our ZedBoard.
P.S. I tried to download and build vanilla Linux Kernel versions 3.12.11 and 3.13.3 from kernel.org - it builds and boots, but some hardware not working. So, we may need to apply some Xilinx Zynq related patches to vanilla kernel, but this is another topic.